|
|
' o ]7 k$ Q! D* V4 U激光雷达传感器行业非常广阔,每个细分方向都可以大有所为,就单线测距传感器而言,致力于解决好机器人的自主定位导航能力,能突破的道路只有一条:以实用性和可靠性作为第一考虑,而非一味的去追求参数。! h7 S" D& U8 M Q( Z" K
那么作为一款供定位导航使用的激光测距传感器,到底什么才是衡量它实用和可靠的指标?* z4 `1 ?5 k4 t( U0 g
测距范围?采样率?精度? 只是水面上的冰山一角!
! S% o, C9 ~: q. N! N( U作为主要用来测量距离的激光雷达传感器,其测量的最大距离(量程)自然是其最核心的指标。大部分激光雷达传感器都会直接以测量距离作为其主要指标。不过除了测距范围外,相信大家也熟悉以下这些数据指标:
, c0 C, i* q1 U较高的扫描频率可以确保安装激光雷达传感器的机器人实现较快速度的运动,并且保证地图构建的质量。
0 F6 m) A7 g6 m1 Q, B但要提高扫描频率并不只是简单的加速激光雷达传感器的内部扫描电机旋转这么简单,对应的需要提高测距采样率。否则当采样频率固定的情况下,更快的扫描速度只会降低角分辨率。+ \6 D: H% i, q
( X+ m% k' G7 o. {; q , n4 _9 k- X6 q- B5 }* t
除了测距距离、扫描频率之外,测量分辨率和精度对于激光雷达传感器性能来说同样重要,并且对于三角测距激光雷达而言,也更具有挑战。$ N, m y, J( w7 _' @
由于测量原理的关系,虽然一般在10米以内都可以实现很高的测距分辨率,但其分辨率亦会随着探测物体距离增加而剧烈下降。
6 A2 X5 s5 r( T5 l: B/ ]& E因此,为了实现更远距离的探测,就不只是增加激光器功率这么简单了,需要对于测距核心有本质的改良。同时为了可靠量产,也需要做很多的配套工作。
8 j% M: R2 I3 W3 u上面列举的这些性能指标都是大家所知道的,自然也是激光测距传感器厂商长久以来一直在不断追求和突破的。
# b; _3 o8 Q) v" ]* q不过,这个并不是说要盲目的追求这些指标的提高,而是要像前面所说,要更加看重整体产品的实用和可靠性,更好的参数不一定能带来更好的产品,可能还会带来其他方面的缺失。0 k( D9 w' r! y5 A$ D) v
所以现在,我们来聊聊你可能不熟悉的激光雷达传感器的一面,也是在选择激光雷达传感器产品时所需要注重考虑的因素。
9 ~, Y9 L4 x$ B. h8 O水下的冰山-日光抗击能力和深色物体检出率; h" z7 M# N7 E8 {! l
除了上述测距距离、采样率、精度等大家都熟知的性能指标外,在雷达实际使用中还有两个非常重要但往往不太被大家了解的性能指标:
, O$ X$ i! F" M/ a J9 M m6 m4 ]深色物体检出率- G" W$ M# p# M3 M
环境光抗干扰能力" H) Q- c9 w* k% j8 X' ?
在实际工作中,很多应用环境中的物体大多不是白色墙面,而是深色的,如家具,暗色的墙纸。此时,激光雷达传感器本身是否对于暗色物体有很好的检出效果就非常重要。一款号称有10多米的激光雷达传感器,如果对于深色物体只有几米的检出率,那就容易导致机器定位和建图出现问题,对后期的定位导航工作也会产生很大的影响。
0 f0 r5 h. k* ?* Z; y( j. p, }目前,激光雷达传感器所标称的距离大多以90%反光率的漫反射物体(如白纸)作为测试基准。但实际上,对于黑色数据的有效检出也同样是一个重要的性能指标。
0 l: @, ]6 Q$ [: E! \2 ]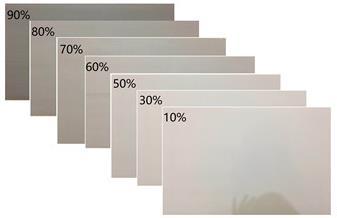 5 U: {$ p9 \% ~ 5 U: {$ p9 \% ~
不过,正因为这个指标的重要性,激光雷达传感器厂商一直将提升对深色物体探测能力作为研发激光雷达传感器的重点方向之一,即使再难也力求突破。经过这几年来的多次迭代,以国内激光雷达传感器厂商思岚来说,其A2M6对于仅有10%以下反射率的黑色物体,也可实现10米的检测距离,这基本与目前TOF原理激光雷达传感器一致。5 p8 p( m5 H$ c% S$ b+ u
说得再多也不如实际检验: ) G) u' S+ O$ G5 {4 o8 F3 s
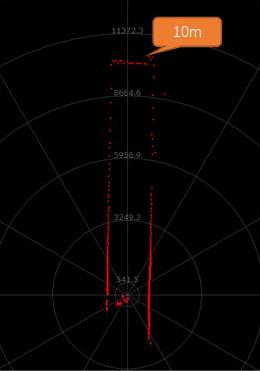
看到通道尽头的黑色物体了吗?这种几乎不反射光的黑色是很多三角测距激光雷达传感器的噩梦。但从实用性角度看,一款标称10米以上的激光雷达传感器,必须至少能在6米距离以上有效得进行检测。但是RPLIDAR A2M6即使在10米距离下,仍旧可以对其进行有效检测。8 h# z3 n+ u1 ]9 o7 d/ s
 ; c) c# e" m& M3 S ; c) c# e" m& M3 S
RPLIDAR A2M6 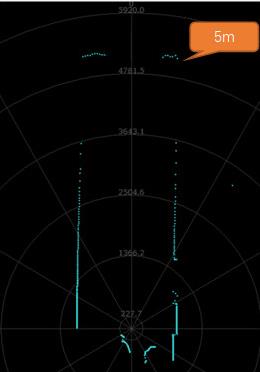 * _) F$ U! i) c% i, |5 I * _) F$ U! i) c% i, |5 I
对黑色检出能力较弱的早期雷达
除了深色物体检出能力外,实际工作环境也会受到各类环境光照的影响。从落地窗投射进来的阳光、各类室内的人造光源甚至是直接暴露在室外工作,这些情况都有可能对于激光雷达传感器产生干扰。
w* m7 M# g6 M+ k- K4 V: f9 U这对于采用三角测距法原理的激光雷达传感器来说影响更加严重。因为需要能够区分出环境光和激光信号,就需要有更优异的处理算法和光学调校。
3 J4 o# S% w r+ V: y G) H- ]传统受限于原理,三角测距法的激光雷达传感器都会给大家一种完全无法抗击环境光照的印象,更不提在室外可以工作的可能性了。- m" P8 T5 d; P: i
不过,对于RPLIDAR而言并不是如此,环境光抗干扰能力从第一代RPLIDAR A1开始就是我们非常重视的指标。以至于对于A2M6系列来说,甚至已经可以完成一定的室外工作任务。! E( H- v4 O4 v) Y0 l5 m) {, Z6 r C
那么,环境光干扰到底有什么问题呢?它会导致雷达出现噪声,影响使用。
5 l) i; U5 |" M1 J" Q一般环境光干扰有如下两种形式:
( J9 n2 ?5 K$ c- ^a)局部干扰光源产生的噪点
/ x L/ i3 ]& v, ?- e: | 像画面中这类人造光源或者通过窗户从外部射入的阳光,会对于某个特定测量角度产生干扰。
+ ]0 X- S- P; A! P8 f6 ]& f& o人造光源可能会产生测距干扰 b)全局环境光干扰产生的致盲和噪点
5 y: w' T% t: q5 ]9 b! Z* @; _这类情况一般出现在室外情况下,由于环境整体的背景光照较强,会导致雷达在各方向上都可能出现干扰。6 a4 R7 k" t8 O' f
同时,也可能导致雷达的有效测量距离变短或者完全无法进行距离测量。
( b6 S' O4 T/ v: B/ B8 u! R3 m如果不对这类干扰进行处理,就会像下图那样:. f3 a# _/ y" S/ W
要很好的实现抗击光干扰对于三角测距激光雷达来说一直是一个很大的挑战。良好的抗环境光能力很大程度上也和前面提到的深色物体检出率很多时候也是矛盾的,除非对激光的安全性置之不理。; d6 E+ C; G9 V: \
这里,我们展示一些相关的测试效果。比如试试看直接一个强光灯对着激光雷达传感器? 像是浴霸灯泡会直接产生红外光的:
7 a, H# _* Q# E s' t在室外整体环境光较强的情况下,这个激光雷达传感器并不会出现致盲或者干扰的问题。当正午阳光照射在墙面上,激光雷达传感器还能测到数据吗?像是下图中,激光雷达传感器不但在5米处毫无压力的检测出了阳光直射的墙面,同时也顺利的探测了环境周围其他物体。
' ?+ E. Q' s+ R; h2 w% f' K) V在一定程度上,经过这几年的努力,激光测距传感器已经具有相对优异的环境光抗击能力,甚至在完全室外的环境下,也可以承担一系列工作。当然,我们也深知目前这一切还有很多工作要做并将一直致力于其性能的提升。) b" a/ ?9 z, q! e* ~9 ^. k
其实,任何一款好产品都不仅仅是它所标识的核心参数那么简单。背后一定还存在着更多的逻辑,和相互之间的牵扯。虽然你未必熟悉过,但它们默默的守护着这款产品在实际工作中表现出色。技术细节有千千万万,但不变的都是对于一款产品的执着。
0 T; d" P+ V7 r' a$ s& B: v9 F
& a# W8 J3 ^3 G! }3 L) C! l; c: Y$ j" m" Z
|
|


 发表于 2019-4-25 14:01:28
发表于 2019-4-25 14:01:28