# o$ W# G8 c$ d2 c* v5 I+ w2 @
7 @- a1 V" d% A* [6 u9 r/ ?2 P6 P7 k( I9 j* p+ P
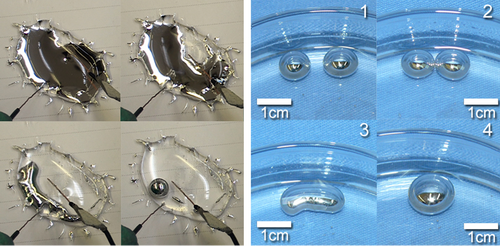
电场控制下的液态金属大尺度变形以及液态金属球之间的粘连与融合现象
$ v; h8 k& _5 W4 e" [5 j, q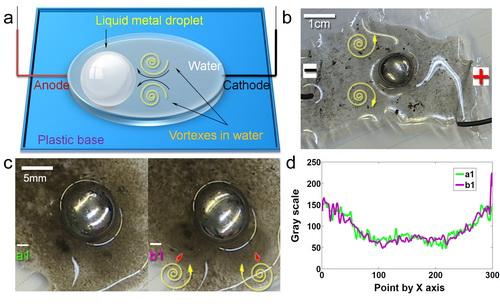
- }7 B; Y% P5 N; k( g( J9 v' ?$ P9 u+ K u7 Y) `
电场控制下的液态金属球高速自旋运动以及由此诱发的周边流体涡漩现象
; b. i( Z' S7 o0 H; q' p4 w
 8 z: b2 G# D: ]5 z
8 z: b2 G# D: ]5 z
; u% N1 d/ T& |7 m+ h' H |7 a
资料图:电影《终结者2》中的液态金属机器人,新发现为建造该类型智能机器人提供了基本要素,虽然还有很长的路要走但已不再只是空中楼阁。
近期,由刘静研究员带领的中国科学院理化技术研究所与清华大学联合研究小组,首次发现电场控制下液态金属与水的复合体可在各种形态及运动模式之间发生转换的基本现象,相应研究在线发表于Advanced Materials(《先进材料》)上,论文题为Diverse Transformations of Liquid Metals Between Different Morphologies(《不同构象之间的液态金属多变形性》)。
此项工作源于团队长期以来在液态金属领域不断研究推进中的偶然发现。论文通过系统的实验,揭示出室温液态金属具有可在不同形态和运动模式之间转换的普适变形能力。比如,浸没于水中的液态金属对象可在低电压作用下呈现出大尺度变形、自旋、定向运动,乃至发生液球之间的自动融合、断裂-再合并等行为,且不受液态金属对象大小的限制;较为独特的是,一块很大的金属液膜可在数秒内即收缩为单颗金属液球,变形过程十分快速,而表面积改变幅度可高达上千倍;此外,在外电场作用下,大量彼此分离的金属液球可发生相互粘连及合并,直至融合成单一的液态金属球;依据于电场控制,液态金属极易实现高速的自旋运动,并在周围水体中诱发出同样处于快速旋转状态下的漩涡对;若适当调整电极和流道,还可将液态金属的运动方式转为单一的快速定向移动。研究表明,造成这些变形与运动的机制之一在于液态金属与水体交界面上的双电层效应。以上丰富的物理学图景革新了人们对于自然界复杂流体、软物质特别是液态金属材料学行为的基本认识。这些超越常规的物体构象转换能力很难通过传统的刚性材料或流体介质实现,它们事实上成为用以构筑可变形智能机器的基本要素,为可变形体特别是液体机器的设计和制造开辟了全新途径。
由于上述发现的科学突破性和实际应用价值,研究小组在今年1月间将部分成果以《液态金属变形体》(Liquid Metal Transformers)为题公布于物理学预印本网站arXiv时,很快就在国际上引起重大反响及广泛热烈的讨论,一度被多达上百个科学或专业英文网站予以专题报道和评介。业界普遍认为,这一“液体机器预示着柔性机器人的新时代”(liquid machines promise new era of soft robots),“这些先驱性工作或让液体金属‘终结者’成真”(this might be about to change thanks to the pioneering work),有关网站还以“中国正在测试自我打印机器人”为题进行了报道;而Advanced Materials的几位审稿人在评阅论文时,认为所揭示的现象“令人着迷”(fascinating),“注定会成为重要的研究领域”(bound to be an important field of study)。无独有偶,今年3月初,一组来自澳大利亚的科学家们也在美国科学院院刊(PNAS)上报道了利用电控下浸没于NaOH溶液中的液态金属微球的旋转效应来驱动流体的工作,同样引起较大反响,这些工作均展示出液态金属技术的独特魅力。
众所周知,在自然界,实现能在不同形态之间自由转换的可变形柔性机器,以执行常规技术难以完成的更为特殊高级的任务,是科学界与工程界长久以来的梦想,相应研究在民用、医疗与科学探索中具有重大理论意义和应用前景。比如,在抗震救灾动中,此类机器人应能根据需要适时变形,以穿过狭小的通道、门缝乃至散布于建筑物中的空隙,之后再重新恢复原形并继续执行任务。事实上,在医学实践中,研制可沿血管包括人体自然腔道运动,以承担各种在体医学服务的柔性机器人,早已成为非常现实的科学目标。显然,在最为高级的机器人中,具备可变形性和柔性特征是极为关键的一环。人们普遍认为,一旦这样的技术得以实现,其对人类活动所作出的贡献,将远远超过现有的机器人。不过,由于受到来自材料特别是技术理念的限制,有关研究尚处于积极的推进之中。
迄今,机器人大多仍是作为一种刚体机器发挥作用,这与自然界中人或动物有着平滑柔软的外表以及无缝连接方式完全不同。柔性机器作为新的发展前沿,已促成多类型机器人的发明,但离理想中的高级机器所应拥有的柔软和普适变形能力还有很大距离。回顾以往人类所构想过的各种先进机器雏形,最让人印象深刻者莫过于美国好莱坞影片《终结者》中始终不能被击败的液态金属机器人,这种可以改变外表形状,呈现各种造型,未来色彩极为浓厚的机器,虽纯属科学幻想,却使人类对机器人的概念有了重大改变。刘静小组的上述发现,为可变形材料特别是液体机器的设计和制造迈出了关键性的一步,一定程度上从理论和技术的层面论证了实现液态金属机器人的可能性;事实上,该研究已打开了系列已趋现实的应用范畴,如制造柔性执行器,控制目标流体或传感器的定向运动、金属液体回收,以及用作微流体阀、泵或更多人工机器等。若采用空间架构的电极控制,还可望将这种智能液态金属单元扩展到三维,以组装出具有特殊造型和可编程能力的仿生物或人形机器;甚至,在外太空探索中的微重力或无重力环境下,也可发展对应的机器来执行相应任务。
总之,作为一大类新兴的功能材料,液态金属拥有许多常规材料不易具备的属性,蕴藏着诸多以往从未被认识的新奇物理特性,为若干科学与技术探索提供了丰富的研究空间。今后,研究小组还将继续围绕可变形机器这一重大基础前沿和战略需求,融合液态金属材料、生物学、机器人、流体力学、电子、传感器以及计算机等学科的知识,系统发展可变形室温液态金属机器的理论与技术体系,全面揭示室温液态金属超常的构象转换、变形与运动机理及调控方法,以期为未来研发尖端柔性机器并开辟全新应用创造条件,最终促成可变形机器从理论到应用技术上的全面突破。  返回腾讯网首页>>
返回腾讯网首页>>


 发表于 2014-8-3 17:36:24
发表于 2014-8-3 17:36:24