|
世界上功率消耗量的近一半是由电机消耗,因此在解决世界能源问题上,电机的高效率化被称为是最有效的措施。
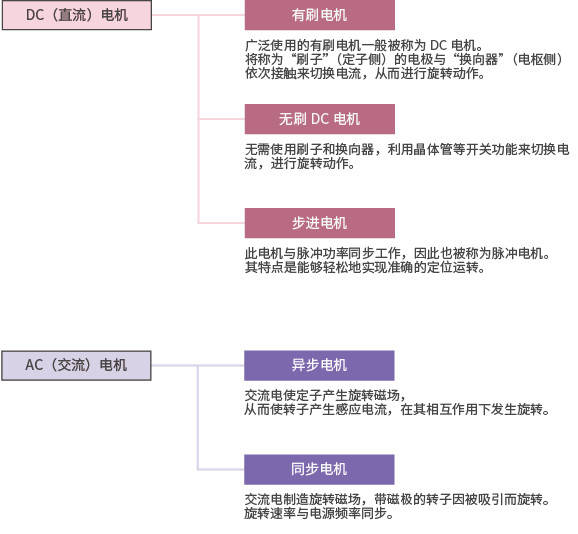
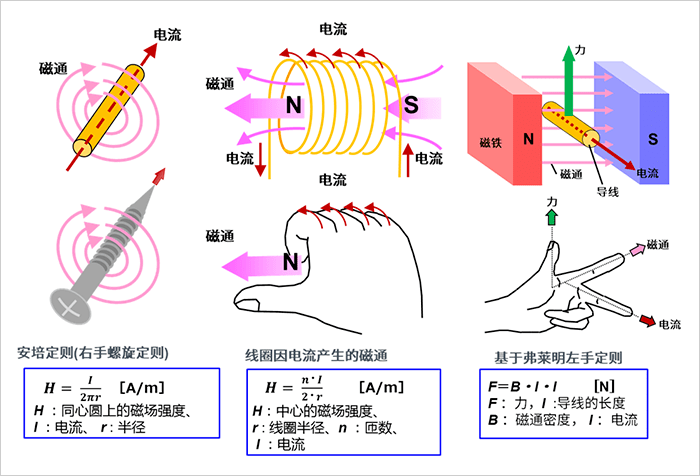
电机种类 一般情况下指将磁场内电流流通产生的力转变为旋转动作,在广义范围内还包括直线动作。 按电机驱动的电源种类,可分为DC电机和AC电机。而 根据电机旋转原理,大致可分为以下几种。(特殊电机除外) 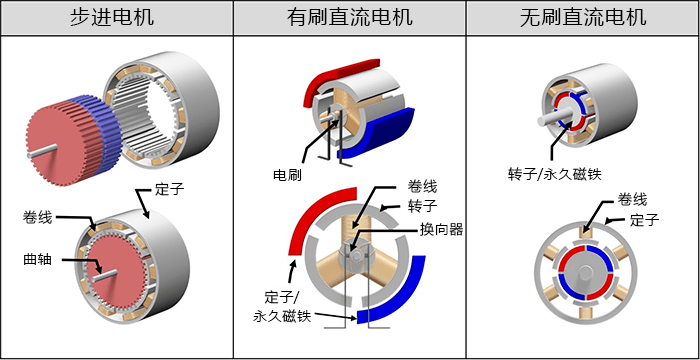 关于电流、磁场和力 关于电流、磁场和力首先,为了便于后续电机原理说明,我们来回顾一下有关电流、磁场和力的基本定律/法则。虽然有一种怀旧的感觉,但如果平时不常使用磁性元器件,就很容易忘记这些知识。 我们结合图片和公式来说明。 当导线框为矩形时,要考虑到作用在电流上的力。 作用于边a、c部分的力F为 产生以中心轴为心轴的转矩。 例如,当考虑到旋转角度仅为θ的状态时,与b和d成直角作用的力为sinθ,因此a部分的转矩Ta由以下公式表示: 以相同的方式考虑c部分,则转矩加倍,并生成由以下公式计算出来的转矩: 由于矩形的面积为S=h・l,因此将其代入上述公式可得出以下结果: 该公式不仅适用于矩形,也适用于圆形等其他常见形状。电机就是利用了该原理。
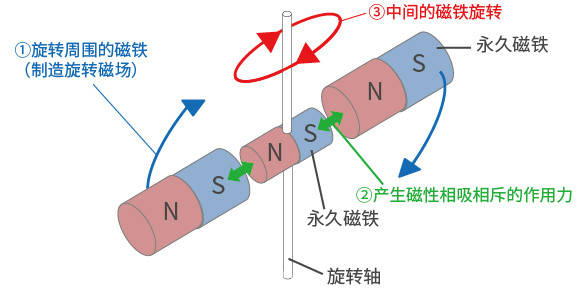
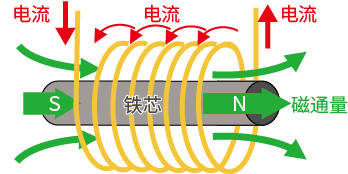
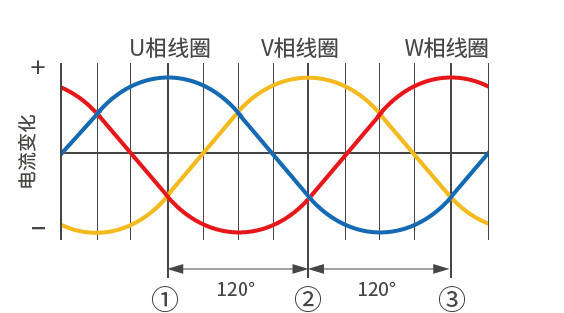
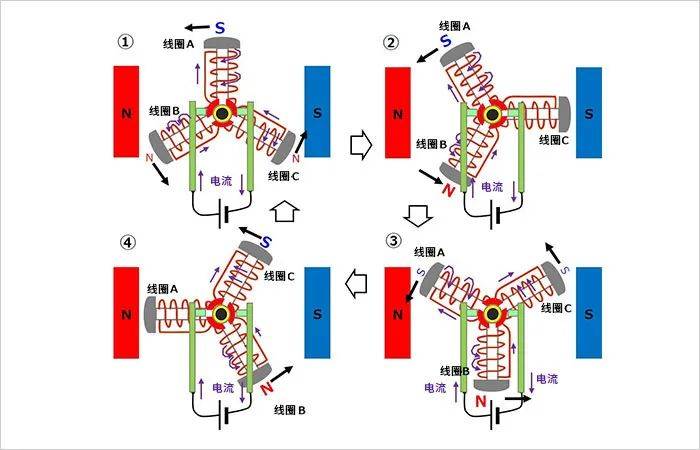
电机如何旋转?1) 电机旋转借助磁铁、磁力 在带旋转轴的永久磁铁周围,①旋转磁铁(使产生旋转磁场),②则根据 N极与S极异极相吸、同级相斥原理,③带旋转轴的磁铁将旋转。 这就是电机旋转的基本原理。 导线中流过电流使其周围产生旋转磁场(磁力)从而磁铁旋转,实际上与此是一样的动作状态。 另外,将导线绕成线圈状,则磁力被合成,形成大的磁场通量(磁通量),产生N极和S极。 另外,在线圈状导线中插入铁芯,磁力线变得容易通过,能产生更强的磁力。 2)实际旋转电机 在此,作为旋转电机的实际方法,介绍利用三相交流和线圈制造旋转磁场的方法。(三相交流是间隔120°相位的交流信号) - 上述①状态下的合成磁场对应下图①。
- 上述②状态下的合成磁场对应下图②。
- 上述③状态下的合成磁场对应下图③。
如上所述,缠绕铁芯的线圈分三相,间隔120°配置U相线圈、V相线圈、W相线圈,电压高的线圈产生N极,电压低的线圈产生S极。 各相位按正弦波变化,因此各线圈产生的极性(N极、S极)和其磁场(磁力)将发生变化。 此时,单看产生N极的线圈,按U相线圈→V相线圈→W相线圈→U相线圈依次变化,从而发生旋转。 小型电机的结构 下图中给出了步进电机、有刷直流(DC)电机、无刷直流(DC)电机这三种电机的大概构造和对比。这些电机的基本组成部件主要为线圈、磁铁和转子,另外由于种类不同,又分线圈固定型和磁铁固定型。 以下为与示例图相关的结构说明。由于更细致地划分的话,还可能存在其他结构,因此请理解本文中介绍的是大框架下的结构。 这里的步进电机的线圈在外侧固定,磁铁在内侧旋转。 这里的有刷直流电机的磁铁在外侧固定,线圈在内侧旋转。由电刷和换向器(commutator)负责向线圈供电和改变电流方向。 这里的无刷电机的线圈在外侧固定,磁铁在内侧旋转。 由于马达电机种类不同,即使基本组成部件相同其结构也有不同。具体将在各部分进行详细说明。
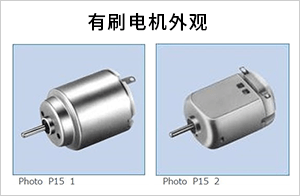
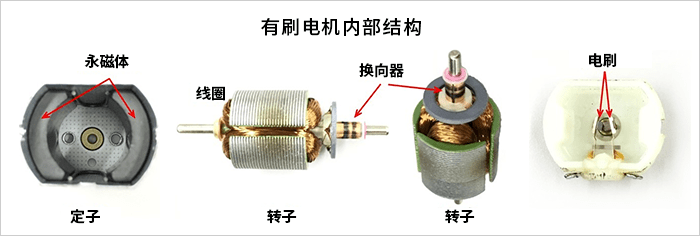
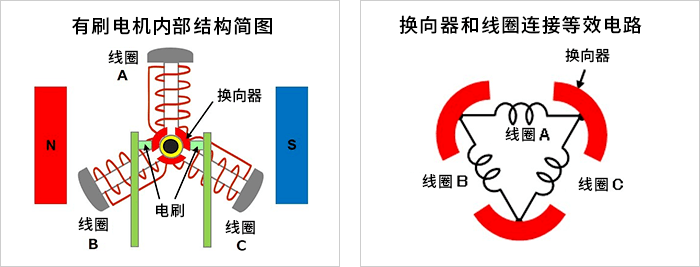
有刷电机 有刷电机的结构 下面是经常在模型中使用的有刷直流电机的外观,以及普通的两极(2个磁体)三槽(3个线圈)型电机的分解示意图。也许很多人都有拆卸电机、拿出磁铁的经验。 可以看到有刷直流电机的永磁体是固定的,有刷直流电机的线圈可以绕内部中心旋转。固定侧称为“定子”,旋转侧称为“转子”。 以下是表示结构概念的结构简图。 旋转中心轴的外围有三个换向器(用于电流切换的弯曲金属片)。为了避免彼此接触,换向器之间间隔120°(360°÷3枚)配置。换向器随着轴的旋转而旋转。 一个换向器连接有一个线圈端和另一个线圈端,并且三个换向器和三个线圈作为电路网形成一个整体(环形)。 两个电刷被固定在0°和180°处,以便与换向器接触。外部直流电源与电刷相连接,电流按电刷→换向器→线圈→电刷的路径流动。 有刷电机的旋转原理 ① 从初始状态逆时针旋转 线圈A在最上方,将电源连接到电刷,设左侧为(+),右侧为(-)。大电流从左电刷通过换向器流到线圈A。这是线圈A的上部(外侧)变为S极的结构。 而由于线圈A的电流的1/2从左电刷流向线圈B和线圈C的方向与线圈A相反,因此线圈B和线圈C的外侧变为弱N极(在图中用略小字母表示)。 这些线圈中产生的磁场以及磁体的排斥和吸引作用使线圈受到逆时针旋转的力。 ② 进一步逆时针旋转 接下来,假设在线圈A逆时针旋转30°的状态下,右电刷与两个换向器接触。 线圈A的电流持续从左电刷流过右电刷,并且线圈的外侧保持S极。 与线圈A相同的电流流经线圈B,并且线圈B的外侧变为较强的N极。 由于线圈C的两端被电刷短路,所以没有电流流动,也没有磁场产生。 即使在这种情况下,也会受到逆时针旋转的力。 从③到④上侧的线圈持续受到向左动的力,下部的线圈持续受到向右动的力,并继续逆时针方向旋转 在线圈每30°旋转到③和④状态下,当线圈位于中心水平轴上方时,线圈的外侧变为S极;当线圈位于下方时变为N极,并且反复该运动。 换句话说,上侧线圈反复受到向左动的力,下侧线圈反复受到向右动的力(均为逆时针方向)。这使转子始终逆时针旋转。 如果将电源连接到相对的左电刷(-)和右电刷(+),则线圈中会产生方向相反的磁场,因此施加到线圈上的力的方向也相反,变为顺时针旋转。 此外,当断开电源时,有刷电机的转子会因没有了使之继续旋转的磁场而停止旋转。
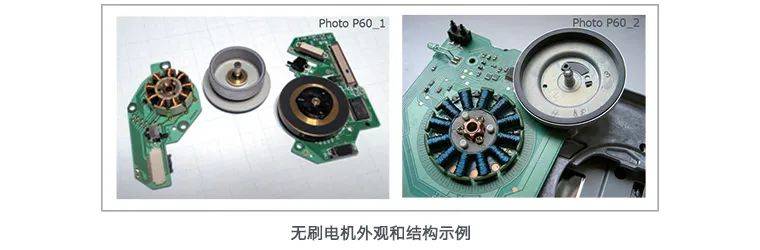
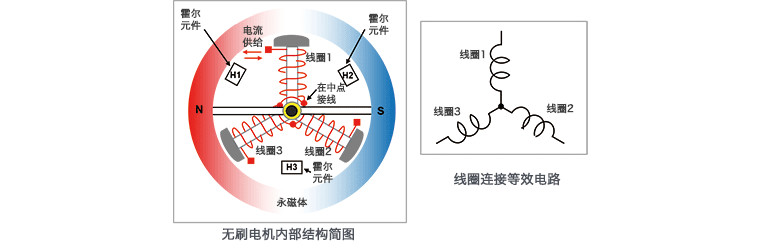
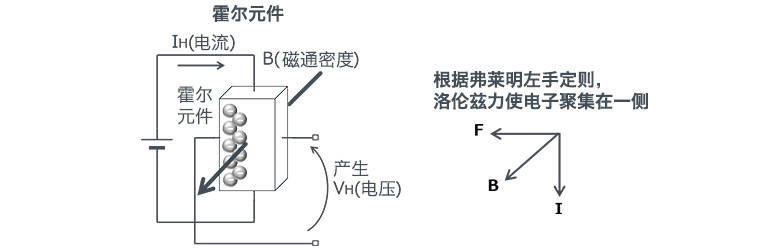
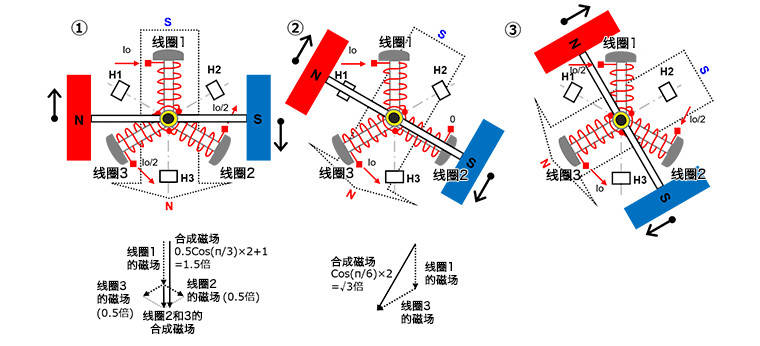
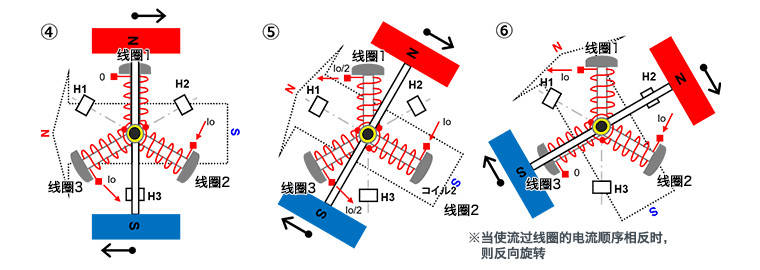
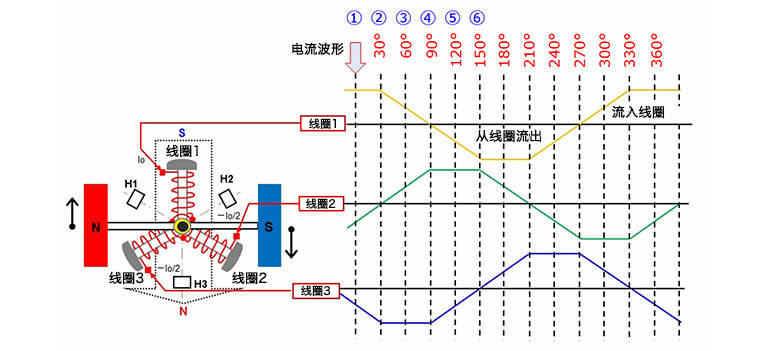
三相全波无刷电机 三相全波无刷电机的外观和结构 下图为无刷电机的外观和结构示例。 左侧是用来旋转光盘播放设备中的光盘的主轴电机示例。共有三相×3共9个线圈。右侧是FDD设备的主轴电机示例,共有12个线圈(三相×4)。线圈被固定在电路板上,并缠绕在铁芯上。 在线圈右侧的盘状部件是永磁体转子。外围是永磁体,转子的轴插入线圈的中心部位并覆盖住线圈部分,永磁体围绕在线圈的外围。 三相全波无刷电机的内部结构图和线圈连接等效电路 接下来是内部结构简图和线圈连接等效电路示意图。 该内部结构简图是结构很简单的2极(2个磁体)3槽(3个线圈)电机示例。它类似于极数和槽数相同的有刷电机结构,但线圈侧是固定的,磁体可以旋转。当然,没有电刷。 在这种情况下,线圈采用Y形接法,使用半导体元件为线圈供给电流,根据旋转的磁体位置来控制电流的流入和流出。在该示例中,使用霍尔元件来检测磁体的位置。霍尔元件配置在线圈和线圈之间,根据磁场强度检测产生的电压并用作位置信息。在前面给出的FDD主轴电机的图像中,也可以看到在线圈和线圈之间有用来检测位置的霍尔元件(线圈的上方)。 霍尔元件是众所周知的磁传感器。可将磁场的大小转换为电压的大小,并以正负来表示磁场的方向。下面是显示霍尔效应的示意图。 霍尔元件利用了“当电流IH流过半导体并且磁通B与电流成直角穿过时,会在垂直于电流和磁场的方向上产生电压VH”的这种现象,美国物理学家Edwin Herbert Hall(埃德温·赫伯特·霍尔)发现了这种现象并将其称为“霍尔效应”。产生的电压VH由下列公式表示。 VH = (KH / d)・IH・B ※KH:霍尔系数,d:磁通穿透面的厚度 如公式所示,电流越大,电压越高。常利用这个特性来检测转子(磁体)的位置。 三相全波无刷电机的旋转原理 下面将按照步骤①~⑥来说明无刷电机的旋转原理。为了易于理解,这里将永磁体从圆形简化成了矩形。 ① 在三相线圈中,设线圈1固定在时钟的12点钟方向上,线圈2固定在时钟的4点钟方向上,线圈3固定在时钟的8点钟方向上。设2极永磁体的N极在左侧,S极在右侧,并且可以旋转。 使电流Io流入线圈1,以在线圈外侧产生S极磁场。使Io/2电流从线圈2和线圈3流出,以在线圈外侧产生N极磁场。 在对线圈2和线圈3的磁场进行矢量合成时,向下产生N极磁场,该磁场是电流Io通过一个线圈时所产生磁场的0.5倍大小,与线圈1的磁场相加变为1.5倍。这会产生一个相对于永磁体成90°角的合成磁场,因此可以产生最大扭矩,永磁体顺时针旋转。 当根据旋转位置减小线圈2的电流并增加线圈3的电流时,合成磁场也顺时针旋转,永磁体也继续旋转。 ② 在旋转了30°的状态下,电流Io流入线圈1,使线圈2中的电流为零,使电流Io从线圈3流出。 线圈1的外侧变为S极,线圈3的外侧变为N极。当矢量合成时,产生的磁场是电流Io通过一个线圈时所产生磁场的√3(≈1.72)倍。这也会产生相对于永磁体的磁场成90°角的合成磁场,并顺时针旋转。 当根据旋转位置减小线圈1的流入电流Io、使线圈2的流入电流从零开始增加、并使线圈3的流出电流增加到Io时,合成磁场也顺时针旋转,永磁体也继续旋转。 ※假设各相电流均为正弦波形,则此处的电流值为Io × sin(π⁄3)=Io × √3⁄2 通过磁场的矢量合成,得到总磁场大小为一个线圈所产生磁场的(√3⁄2)2×2=1.5 倍。当各相电流均为正弦波时,无论永磁体的位置在哪,矢量合成磁场的大小均为一个线圈所产生磁场的1.5倍,并且磁场相对于永磁体的磁场成90°角。 ③ 在继续旋转了30°的状态下,电流Io/2流入线圈1,电流Io/2流入线圈2,电流Io从线圈3流出。 线圈1的外侧变为S极,线圈2的外侧也变为S极,线圈3的外侧变为N极。当矢量合成时,产生的磁场是电流Io流过一个线圈时所产生磁场的1.5倍(与①相同)。这里也会产生相对于永磁体的磁场成90°角的合成磁场,并顺时针旋转。 ④~⑥ 以①~③相同的方式旋转。 这样,如果不断根据永磁体的位置依次切换流入线圈的电流,则永磁体将沿固定方向旋转。同样,如果使电流反向流动并使合成磁场方向相反,则会逆时针旋转。 下图连续显示了上述①~⑥每个步骤的每个线圈的电流。通过以上介绍,应该可以理解电流变化与旋转之间的关系了。
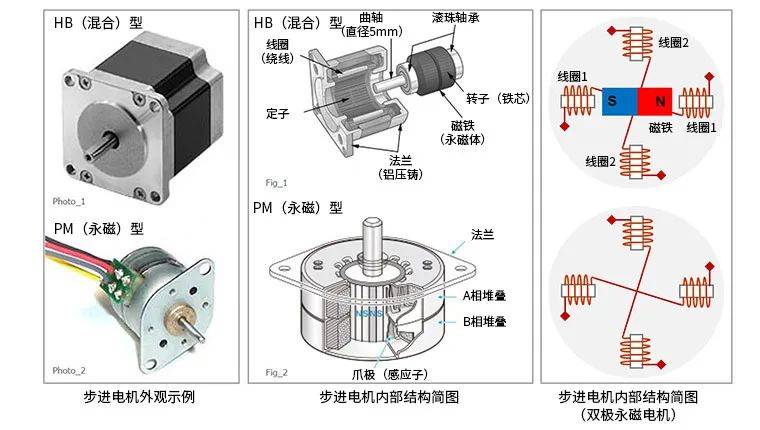
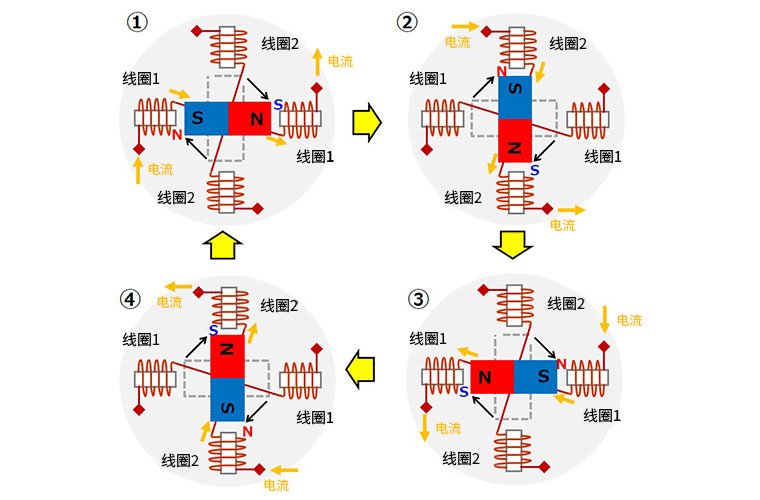
步进电机 步进电机是一种可以与脉冲信号同步准确地控制旋转角度和转速的电机,步进电机的也称为“脉冲电机”。由于步进电机无需使用位置传感器仅通过开环控制即可实现准确的定位而被广泛用于需要定位的设备中。 步进电机的结构(两相双极) 下图从左到右分别是步进电机的外观示例、内部结构简图和结构概念简图。 在外观示例中,给出的是HB(混合)型和PM(永磁)型步进电机的外观。在中间的结构图给出的也是HB型和PM型的结构。 步进电机是线圈固定、永磁体旋转的结构。右侧的步进电机内部结构概念图是使用两相(两组)线圈的PM电机示例。在步进电机基本结构示例中,线圈配置在外侧,永磁体配置在内侧。线圈除了两相外,还有三相和五相等相数较多的类型。 有些步进电机具有其他不同的结构,但是为了便于介绍其工作原理而在本文中给出了基本结构的步进电机。通过本文希望了解步进电机基本上采用线圈固定、永磁体旋转的结构。 步进电机的基本工作原理(单相励磁) 下面使用下图来介绍步进电机的基本工作原理。这是上面两相双极型线圈每一相(一组线圈)的励磁示例。该图的前提是状态从①到④变化。线圈分别由线圈1和线圈2组成。另外,电流箭头表示电流流动方向。 - ①
- ・使电流从线圈1的左侧流入,从线圈1的右侧流出。
- ・勿使电流流过线圈2。
- ・此时,左线圈1的内侧变为N,右线圈1的内侧变为S。
- ・因此,中间的永磁体被线圈1的磁场吸引,变为左侧S和右侧N的状态并停止。
- ②
- ・停止线圈1的电流,使电流从线圈2的上侧流入,从线圈2的下侧流出。
- ・上线圈2的内侧变为N,下线圈2的内侧变为S。
- ・永磁体被其磁场吸引,顺时针旋转90°停止。
- ③
- ・停止线圈2的电流,使电流从线圈1的右侧流入,从线圈1的左侧流出。
- ・左线圈1的内侧变为S,右线圈1的内侧变为N。
- ・永磁体被其磁场吸引,顺时针再旋转90°停止。
- ④
- ・停止线圈1的电流,使电流从线圈2的下侧流入,从线圈2的上侧流出。
- ・上线圈2的内侧变为S,下线圈2的内侧变为N。
- ・永磁体被其磁场吸引,顺时针再旋转90°停止。
通过电子电路按照上述①至④的顺序切换流过线圈的电流,即可使步进电机旋转。在该示例中,每一次开关动作会使步进电机旋转90°。另外,当使电流不断流过某一线圈时,可以保持停止状态并使步进电机具有保持转矩。顺便提一下,如果将流过线圈的电流顺序反过来,则可以使步进电机反向旋转。
| 

 发表于 2023-3-6 10:27:37
发表于 2023-3-6 10:27:37