|
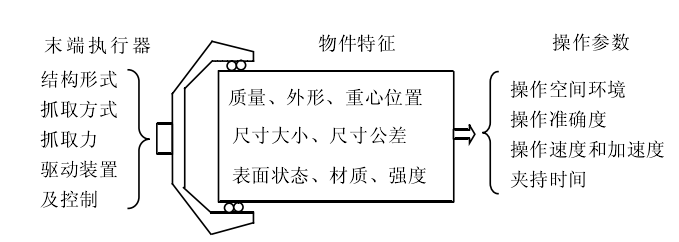
对于工业机器人来说,搬运物料是其抓取作业方式中较为重要的应用之一。工业机器人作为一种具有较强通用性的作业设备,其作业任务能否顺利完成直接取决于夹持机构,因此机器人末端的夹持机构要结合实际的作业任务以及工作环境的要求来设计,这导致了夹持机构结构形式的多样化。 图1 末端执行器要素、特征、参数的联系
V4 U! d- e6 w. u4 X
大多数机械式夹持机构为双指头爪式,根据手指运动方式的可分为:回转型、平移型;夹持方式的不同又可分成内撑式与外夹式;根据结构特性可分为气动式、电动式、液压式及其组合夹持机构。
9 y: b* }. R2 {3 {- x
一、气压式末端夹持机构气压传动的气源获取较为方便,动作速度快,工作介质无污染,同时流动性优于液压系统,压力损失较小,适用于远距离控制。以下为几种气动式机械手装置:
; ]- W: T% f7 o$ ?
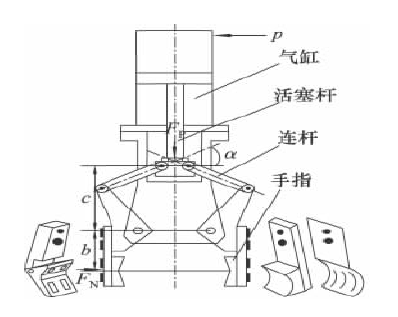
1. 回转型连杆杠杆式夹持机构 & U0 B) n7 s/ J/ S9 i
该种装置的手指(如V型手指、弧形手指)通过螺栓固定在夹持机构上,更换较为方便,因此能够显著扩大夹持机构的应用场合。 $ D1 F' S5 b8 k( F3 u% e7 |
图 2 回转型连杆杠杆式夹持机构结构
+ @& x% A9 v! x' t% M- [
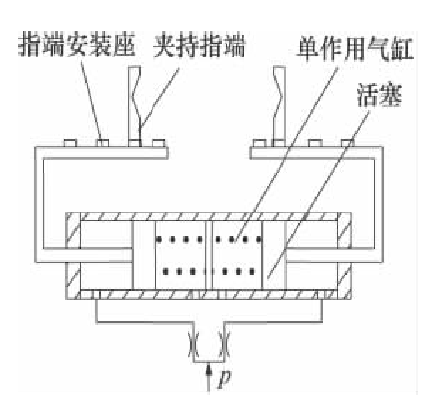
2.直杆式双气缸平移夹持机构
. d+ E: p! T. M+ M9 n& H% {
这种夹持机构的指端通常安装于配备有指端安装座的直杆上,当压力气体进入单作用式双气缸的两个有杆腔时,会推动活塞逐渐向中间移动,直至将工件夹紧。 2 ]! V$ Q. b% p* K7 s( d5 o
图3 直杆式双气缸平移夹持机构结构图 - d( i0 E- Y$ t' n* x4 B: t
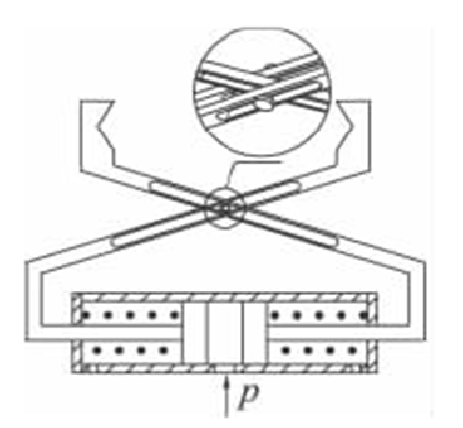
3.连杆交叉式双气缸平移夹持机构 & d+ J7 R4 _& _
一般由单作用双联气缸与交叉式指部构成。气体进入气缸的中间腔后,会推动两个活塞往两边运动,从而带动连杆运动,交叉式指端便会将工件牢牢固定;如果没有空气进入中间腔体,活塞会在弹簧推力的作用下复位,固定的工件会被松开。
# k% S2 S0 z' ^, V, A2 x
图4 交叉式双气缸平移夹持机构结构图 , ?! C+ _2 } Y
4.内撑式连杆杠杆式夹持机构 " D" h" W: T2 ~9 E9 |% N* J9 h
通过四连杆机构实现力的传递,其撑紧方向和外夹式相反,主要用于抓取带有内孔的薄壁工件。夹持机构撑紧工件后,为了确保其能够顺利的用内孔定位,通常安装 3 个手指。 / l$ C3 [ ]3 D+ W6 Y7 h+ o Y W
图 5 内撑式连杆杠杆式夹持机构结构图
/ _& {: v8 H6 m, k6 E! j; H
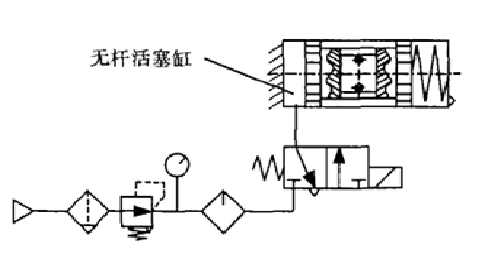
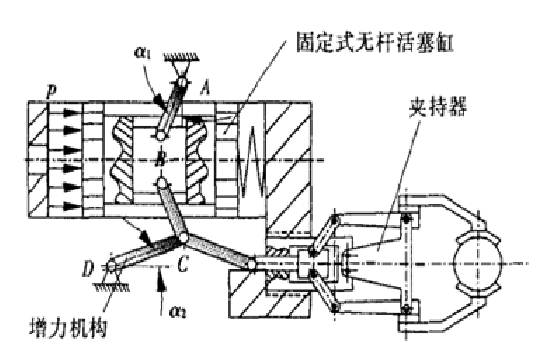
5.固定式无杆活塞缸驱动的增力机构 " G: m% p8 T3 y: D: B3 `+ ], U) R
固定式无杆活塞缸的气动系统如下所示,该缸为单作用气缸,反向靠弹簧力作用,由两位三通电磁阀实现换向。
9 k2 }9 S2 \: J4 b2 h7 \; |) O( |3 A
图6 固定式无杆活塞缸的气动系统
2 q3 [+ b4 n6 H$ C e
在无杆活塞缸的活塞径向位置安装有一个过渡滑块,而在滑块的两端对称地铰接两铰杆,如果有外力作用于活塞,活塞便会左右运动,从而推动滑块上下移动。当系统夹紧时,铰点B将绕A点作圆周运动,而滑块上下运动可增加一个自由度,用C点的摆动代替整个汽缸体的摆动。 2 b8 ^* w7 u9 \7 H
图7 固定式无杆活塞缸驱动的增力机构
- S' ~3 H4 V& g" D x
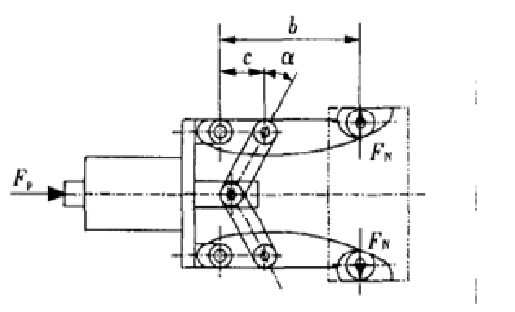
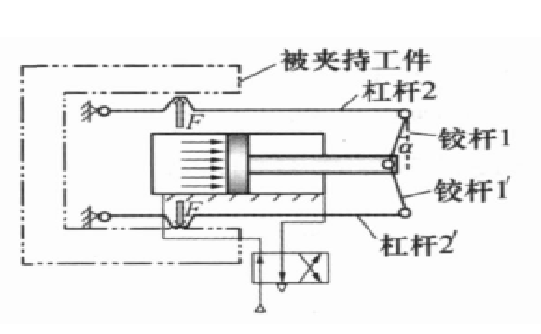
6.铰杆2杠杆串联增力机构的内夹持气动装置
& ^4 E5 `! v3 E. x& @
当压缩空气的方向控制阀处于图所示左位工作状态时,气压缸的左腔即无杆腔进入压缩空气,活塞将在空气压力的作用下向右运动,使铰杆压力角α逐渐减小,借助角度效应将空气压力放大,接着将力传到恒增力杠杆机构杠杆上,作用力将被再一次放大,变为夹持工件的作用力 F。当方向控制阀处于右位工作状态时,气压缸的右腔即有杆腔进入压缩空气,推动活塞向左运动,夹持机构松开工件。
% b$ m0 H, B e' {
图8 铰杆2杠杆串联增力机构的内夹持气动机械手 2 c* A2 l5 Q3 B8 Z
二、气吸式末端夹持机构气吸式末端夹持机构借助吸盘内的负压所形成的吸力来移动物体。主要用于抓取外形较大、厚度适中、刚性较差的玻璃、纸张、钢材等物体。根据负压产生方法可分为以下几种:
. h- G9 t- @( D* c4 z" B5 v" _6 g
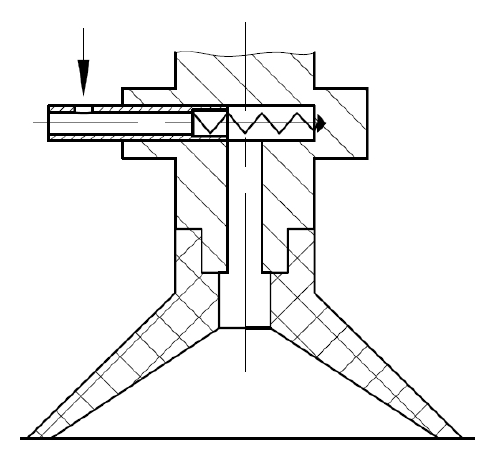
1.挤压式吸盘 吸盘内的空气由向下的挤压力排挤而出,使吸盘内部产生负压,形成吸力将物体吸住。用于抓取形状不大,厚度较薄且质量较轻的工件。 图9 挤压式吸盘结构图
! p# J6 C, G# N" z7 u8 j0 a
2.气流负压式吸盘 / L" I2 L+ M" i# Q) V0 Z
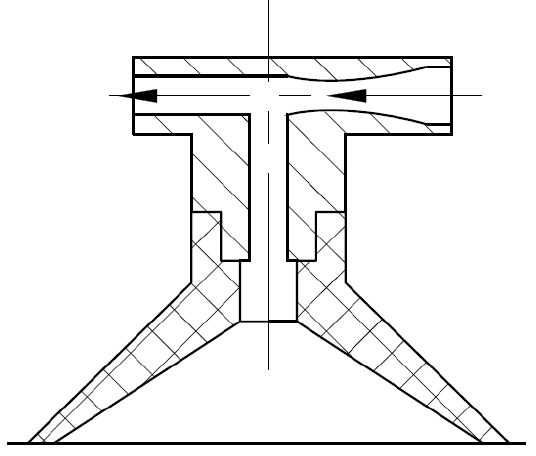
控制阀将来自气泵的压缩空气自喷嘴喷入,压缩空气的流动会产生高速射流,从而带走吸盘内中的空气,如此便在吸盘内产生负压,负压所形成的吸力便可吸住工件。 3 @6 C/ t1 @3 W' Z8 d
图10 气流负压式吸盘结构图 ; y3 J% K# f- W
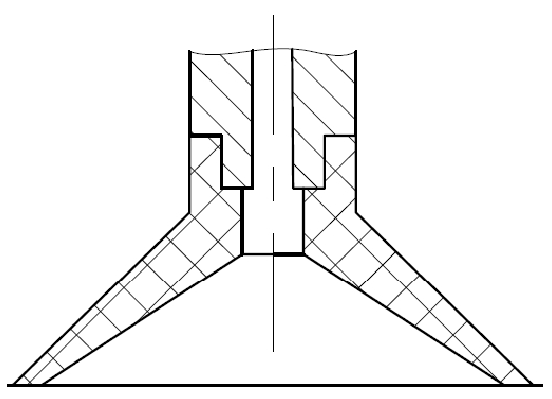
3.真空泵排气式吸盘 利用电磁控制阀将真空泵与吸盘相联,当抽气时,吸盘腔内空气被抽走时,形成负压而吸住物体。反之,控制阀将吸盘与大气相联时,吸盘失去吸力而松开工件。
! h+ c& l+ D0 X8 ^9 `0 @
图11 真空泵排气式吸盘结构图
; \# T3 H* e$ u3 B- r
三、液压式末端夹持机构1.常闭式夹持机构:借助弹簧强大预紧力固定钻具,液压松开。夹持机构未执行抓取任务时,处于夹紧钻具状态。其基本结构为一组经过预压缩的弹簧作用在斜面或杠杆等增力机构上,使卡瓦座产生轴向移动,带动卡瓦径向移动,夹紧钻具;高压油进入卡瓦座与外壳形成的液压缸,进一步压缩弹簧,使卡瓦座和卡瓦产生反向运动,松开钻具。
B& U+ j& A/ J/ q5 o4 W! M
2.常开式夹持机构:通常采用弹簧松开、液压夹紧的方式,未执行抓取任务时处于松开状态。夹持机构靠液压缸的推力产生夹持力,油压减低将导致夹持力的减小,通常要在油路上设置性能可靠的液压锁来保持油压。 8 v K c" Z) Q/ g. H
3.液压松紧型夹持机构:松开、夹紧均通过液压实现,如果两侧液压缸进油口均通通高压油,则卡瓦会随着活塞运动向中心收拢,夹紧钻具,改变高压油入口,卡瓦则背离中心,松开钻具。
9 Q" q, M" U" f- d, m7 q
4.复合式液压夹持机构:这种装置有主液压缸与副液压缸,副液压缸侧连接一组碟簧,当高压油进入主液压缸,推动主液压缸缸体移动,通过顶柱将力传给副液压缸侧的卡瓦座,碟簧被进一步压缩,卡瓦座移动;同时,主液压缸侧卡瓦座在弹簧力作用下移动,松开钻具。 # Y$ @' R! ?0 N5 x+ z' B" u: C
四、磁吸式末端夹持机构
K u' ~# _- T7 {% K$ b分为电磁吸盘和永久吸盘两种。电磁吸盘是用接通和切断线圈中的电流,产生和消除磁力的方法来吸住和释放铁磁性物体。永磁吸盘则是利用永久磁钢的磁力来吸住铁磁性物体的它是通过移动隔磁物体来改变吸盘中磁力线回路,从而达到吸住和释放物体的目的。但同样是吸盘,永久吸盘的吸力不如电磁吸盘大。 k3 k! b: M: n5 S4 |7 A
/ U: S- v( Y) N3 L+ [- j. U7 Z* `- E7 Q2 y- q
| 

 发表于 2022-10-19 09:39:45
发表于 2022-10-19 09:39:45
 $ M$ l# _/ O9 h. o w) P$ b5 z
$ M$ l# _/ O9 h. o w) P$ b5 z