|
上一篇文章分析了几种比较实用巧妙的动图机构,这次我们就来看三种实例的,分析完后,同样还是在文章的最后放上模型下载的方式,那么下面我们就直接进入主题。
还是先来看一下,今天要分析的有哪些机构:
1、横移旋转联动机械手; 2、可转向的凸轮机械手; 3、n形轨迹凸轮机械手
下面就开始挨个分析:
横移旋转联动机械手

一、还是先来说一下这个小机构的工作顺序:
1、纵向气缸伸出,将整个机构向下推动; 2、然后吸盘吸取产品后,纵向气缸再缩回,将整个机构拉到上面; 3、横向气缸缩回,带着移动机构向右运动;且因为连杆的作用,使末端吸盘在移动的同时还会发生旋转; 4、移动机构到位后,升降气缸伸出,由吸盘将产品放置到位;然后升降气缸再缩回,循环以上的动作。
二、接下来就是分析机构:
根据这个机械手的名称咱们就知道,它既可以横移,又可以旋转,所以我们把它分成移动部分和旋转部分来说。
1、移动部分 从第一张图可以看到,这个机械手具有纵向和横向移动的能力,其实这部分涉及的机构也比较简单,就是气缸推动滑块沿着滑轨移动,所以就不啰嗦了。
2、旋转部分 在分析旋转部分之前,我们先来看一下移动机构的细节图:

1) 可以看到,旋转轴穿过轴承,然后上端和连杆1固定在一起,这样连杆在运动时就会带动旋转轴旋转;
2) 吸盘连接轴穿过旋转轴(配合方式见上图),同时它们之间还有一个弹簧(弹簧放置位);在连接轴的上端有一个固定环,起到限位的作用。
这样连接轴不仅可以跟随旋转轴旋转,还能上下滑动,在吸盘吸取产品时可以起到作用。
再来看一下连杆是怎么让吸盘旋转的:
上面做了一个横向气缸在伸缩时的动图,然后我们来单独看一下连杆这部分的细节图:

它的工作原理如下:
1) 气缸缩回时,会将移动机构往回拉,这时候就会带着连杆1向右侧运动; 2) 连杆1又带动连杆2运动,这时连杆2就会绕着旋转点进行转动; 3) 连杆2旋转时,又会带着轴销处也转动,此时连杆1和吸盘旋转轴也就跟着一起转动了。
下面再补充一个运动轨迹图会更容易理解点:

可转向的凸轮机械手

旋转轴带动凸轮1和凸轮2一起转动,其中凸轮2是负责夹爪上下运动的;凸轮1是负责夹爪前后运动的,而夹爪在前后运动的同时,由于连杆2和连杆3的作用,还会伴随着旋转运动。
以上就是凸轮机械手的大致工作原理,下面咱们还是把它分成两个部分来说,一是上下运动部分;二是前后运动部分。
一、上下运动部分

首先我们需要知道的是:导轨、固定块以及横向移动滑块是连接在一起的;滑块是固定在框架上的。
1、凸轮2顺时针旋转,当随动器位于凸轮的基圆部分时,导轨、固定块以及横向移动滑块处于下方; 2、而随着凸轮2的继续旋转,随动器进入运动部分,这时导轨、固定块就开始上升; 3、凸轮2不断的旋转,整个机构就会循环上升、下降的动作。
二、前后运动部分

首先我们需要知道的是:
1、固定销轴是连接在框架上固定不动的,连杆1可以绕着固定销轴转动; 2、连接板和导轨是固定在一起的; 3、拉簧放置位是有一个拉簧的,一端固定在导轨上,一端固定在框架上,作用是为了将导轨拉回。
这个部分的工作原理如下:
1、凸轮1逆时针旋转,当随动器1位于基圆部分时,连接板和导轨处于被拉簧拉回的状态; 2、当随动器1开始进入运动部分时,连杆1会被凸轮1推动着顺时针转动,而这时随动器2就会跟着推动连接板和导轨向右侧滑动。 以上就是凸轮1让机构前进/后退的工作原理,但是别忘了夹爪在前进/后退的过程中还是伴随着旋转的,所以接下来我们再简单说一下夹爪是怎么旋转的:

上图中的固定块是不动的,连杆3和夹爪连接轴固定在一起同时旋转。我想大家也发现了,其实这个旋转机构的原理和第一个机构中的旋转部分是一样的,所以在这里我就不再啰嗦一遍了。 关于凸轮1和凸轮2的配合关系,就需要大家根据自己的实际使用工况进行设计了。
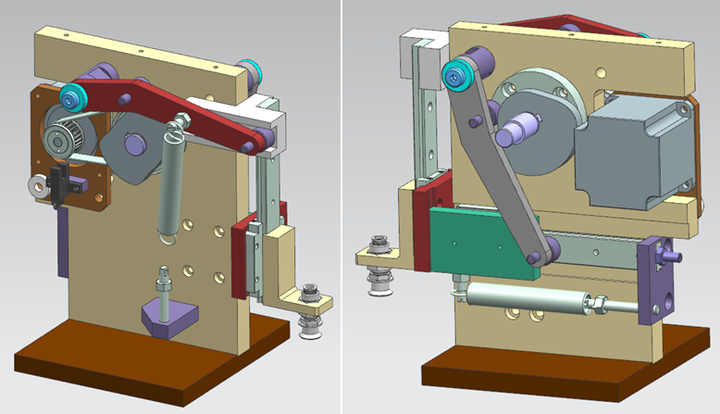
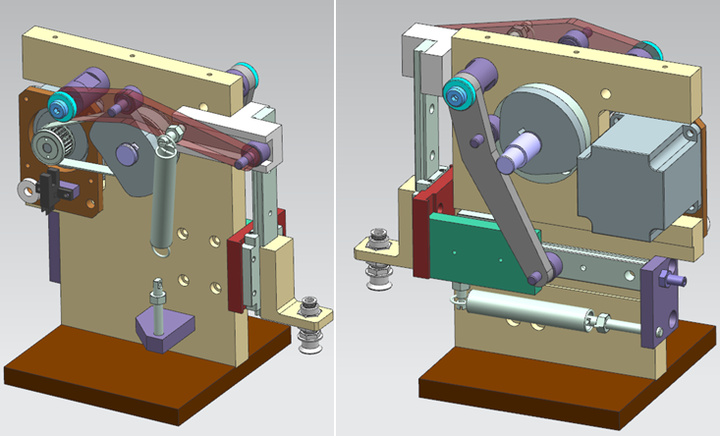
n形轨迹凸轮机械手
在分析这个机构之前,我们先来看一下它的动图:
接下来,我们就来分析一下这个机构的动作原理:

整个机构的工作顺序如下:
1、驱动电机通过同步带轮机构带动凸轮1和凸轮2一起转动(凸轮1、凸轮2以及同步轮通过连接轴连在一起,一同旋转); 2、当凸轮1转动时,会推动随动器1运动,从而使连杆1绕着旋转点1转动,这时随动器2就会带着滑块1向上运动;当随动器1位于凸轮1的基圆部分时,拉簧1会拉着连杆1向下转动,同时滑块1就会向下运动; 3、凸轮2转动时,推动随动器3运动,从而使连杆2绕着旋转点2转动,这时随动器4就会推着滑块2以及前面的滑动部分一起向左侧移动; 4、最后通过调整凸轮1和凸轮2的配合关系,就可以实现末端滑动部分的n形运动轨迹。
其实,机构中上下运动部分、前后运动部分的工作原理和第2个案例中的前后运动部分是非常相似的,所以关于这个机构上下运动、前后运动的详细工作原理大家可以参考第2个案例。 下面主要来说一下凸轮1和凸轮2是怎么配合工作的:
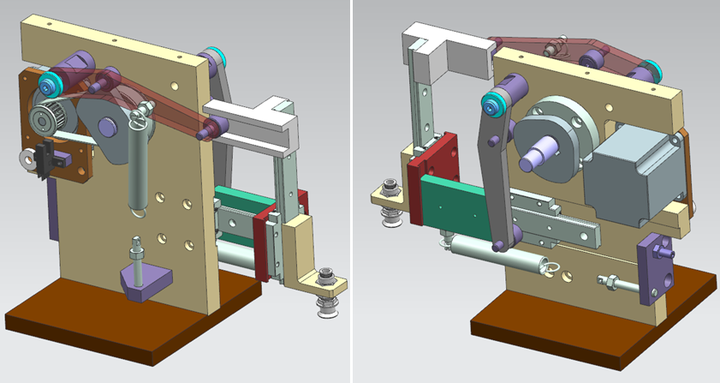
1、初始状态是这样的:

2、当凸轮1逆时针旋转,使滑动部分向上运动到顶点:
从上图可以看到,当凸轮1将连杆1推到最高点时,随动器3仍位于凸轮2的基圆部分。
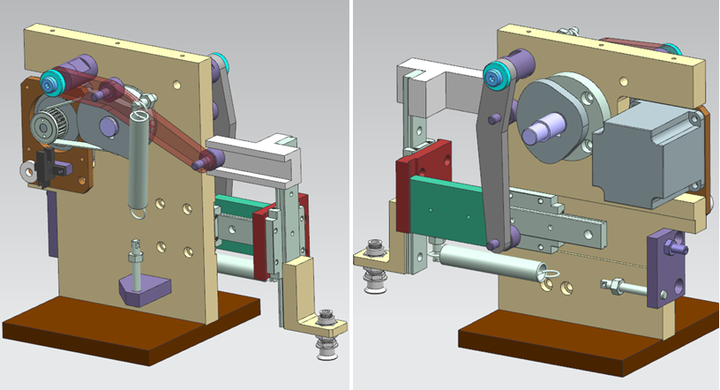
3、继续转动,就会使随动器3进入凸轮2的运动部分。将滑动部分推到最前端,状态如下:
从上图可以看到,随动器1位于凸轮1运动部分,但即将进入基圆部分;随动器3刚进入凸轮2的运动部分。
4、凸轮1继续逆时针转动,使滑动部分向下运动,状态如下:
5、驱动电机继续转动,就会使滑动部分开始上升:
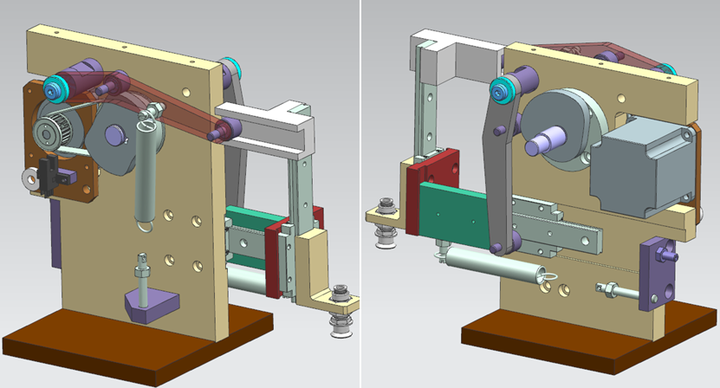
到达顶点后,可以看到随动器3即将进入凸轮2的基圆部分。
6、随着凸轮的转动,滑动部分在拉簧2的作用下就会往回运动:
从上图可以看到,滑动部分缩到底,这时随动器1处于即将进入凸轮1基圆部分的状态。
7、最后一步就是滑动部分向下运动,达到步骤1的状态。以上1-7的步骤就是整个机构运动的一个循环。
OK,这次要分享的机构就分析完了,模型还是放到公众号里,大家回复:凸轮机械手,就可以拿到下载链接了。
对了,欢迎大家来《每次一例》找我。
|  [复制链接]
[复制链接]



 发表于 2020-7-7 10:29:43
发表于 2020-7-7 10:29:43


 楼主
楼主