本帖最后由 每次一例 于 2020-4-8 10:55 编辑
哈喽,大家好,我是老张,因为前段时间出差了,所以中间就鸽了一期,希望大家见谅哈
(一定要看到最后哦,图纸放在最后了)
其实在没有发文章的这段时间,也一直在想,这一期是分析几个机构,还是分析一个什么设备呢?在网上找了一段时间后,就发现了这么一个非标组装设备,里面值得学习的机构不少,所以就决定分析它了!
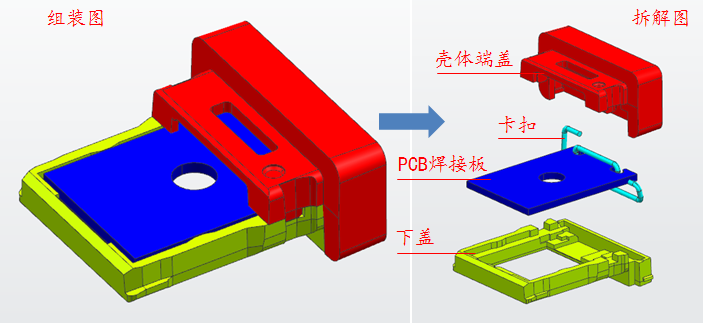
而关于这个组装设备,它组装的产品是什么呢?看下图:
这个东西其实是USB接头的组成部分,知道组装的是什么产品后,下面再来看一下整个设备的拆解和工作原理视频。
(假装有视频)其实是有视频的,但是因为知乎不支持腾讯视频的格式,所以没法上传,有想看的可以到公众号里。
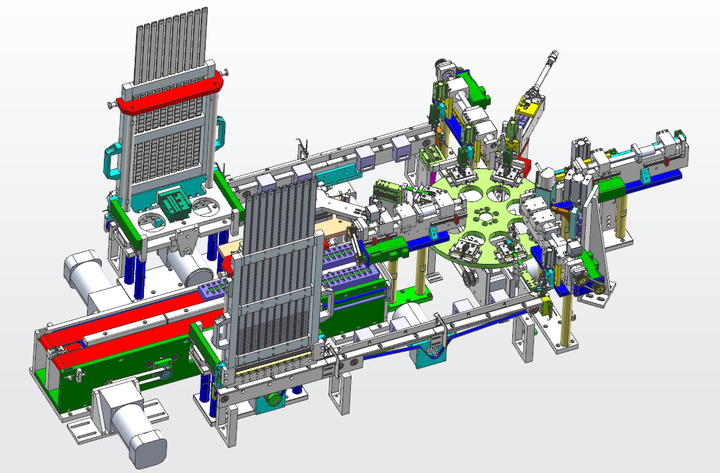
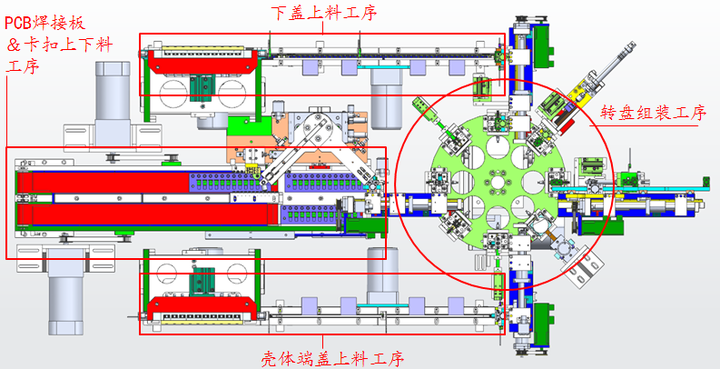
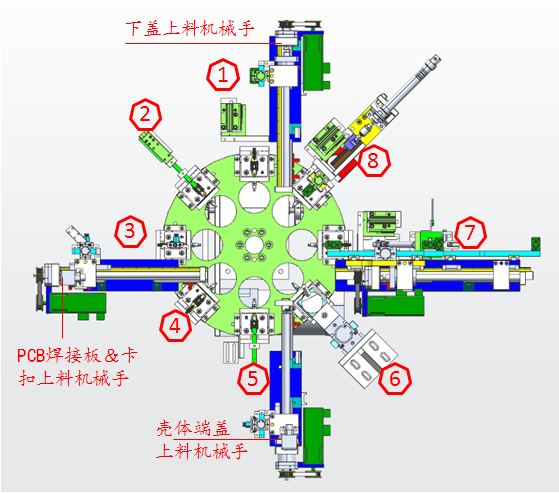
看完视频,我想大家应该对这个设备已经有了个大概的印象,下面就开始分析它的机构和原理,按照惯例,还是把整个设备分成几个工序:
左边三个工序都是相互独立的,只是最后每个工序对应的产品进入到组装工序,进行组装。
先看一下整体工作顺序:
1、下盖、PCB焊接板&卡扣和壳体端盖,分别通过各自的上料工序,进入到转盘组装工序 2、转盘组装工序,通过间歇旋转的方式,对产品进行依次组装、测试; 3、最后,OK品,排出线外;NG品,进行回收处理。
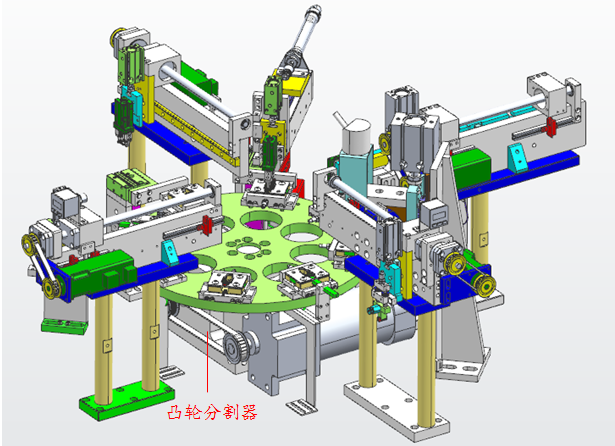
再来看一下轴测图:
接下来,就按照下面的顺序,依次分析:
1、下盖上料工序; 2、PCB焊接板&卡扣上下料工序; 3、壳体端盖上料工序; 4、转盘组装工序。
1 下盖上料工序
还是先来看一下这个工序的具体步骤:
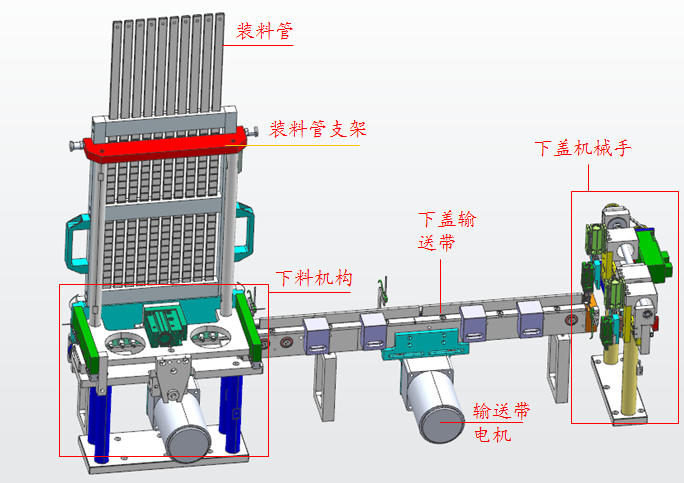
1、人工把下盖放到装料管中,将装料管装满后,放到装料管支架上; 2、由于重力作用,下盖沿着装料管向下; 3、下料机构将下盖按照指定状态放到输送带上,然后到输送带末端; 4、下盖机械手从输送带末端取料,放到转盘组装工序上。
一、装料管、装料管支架、下料机构
先来看一下这个部分的工作原理:
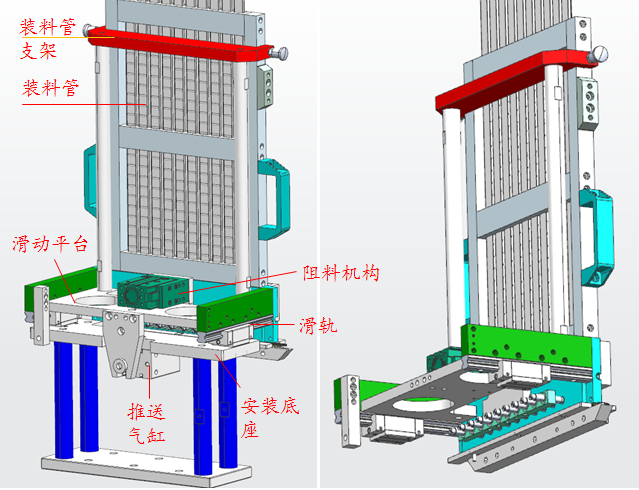
从上图中可以看到,装料管固定在支架上,和阻料机构一起安装在滑动平台上,然后整个滑动平台在推送气缸的作用下沿着滑轨运动。
至于它为什么要设计成这样呢?接下来咱们继续分析,后面就会说到了。
1、装料管、装料管支架
再看一下装料管和装料管支架分离后:
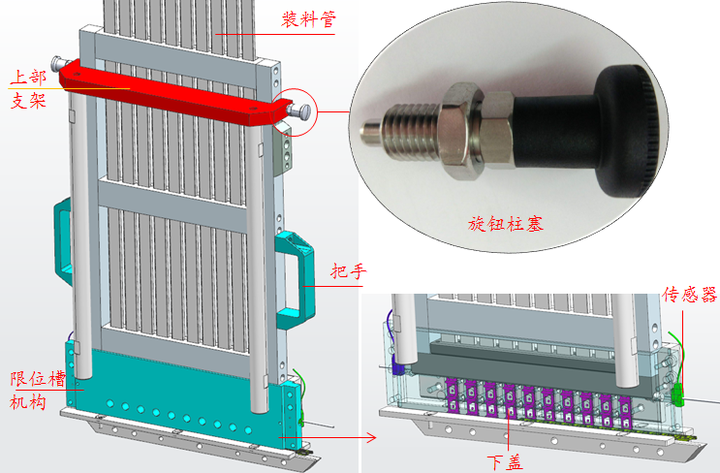
装料管中的下盖,通过重力降到下面,当传感器检测到装料管中没有料时,提示工人将装料管取走、装料,再重新放入支架。
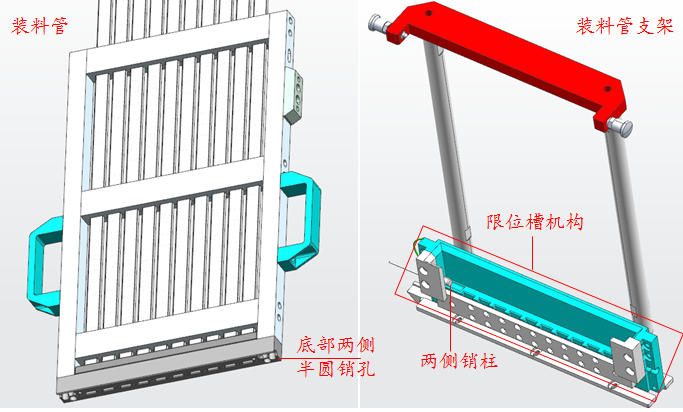
可以看到,装料管固定的顺序:
1)将底部插入限位槽机构,同时将底部两侧的半圆销孔,对准放到限位槽机构的两侧销柱上; 2)然后通过上部支架两侧旋钮柱塞,将装料管固定住。
注:旋钮柱塞的工作原理是往外拔黑色的旋钮,前部凸出的销柱就会缩回去。
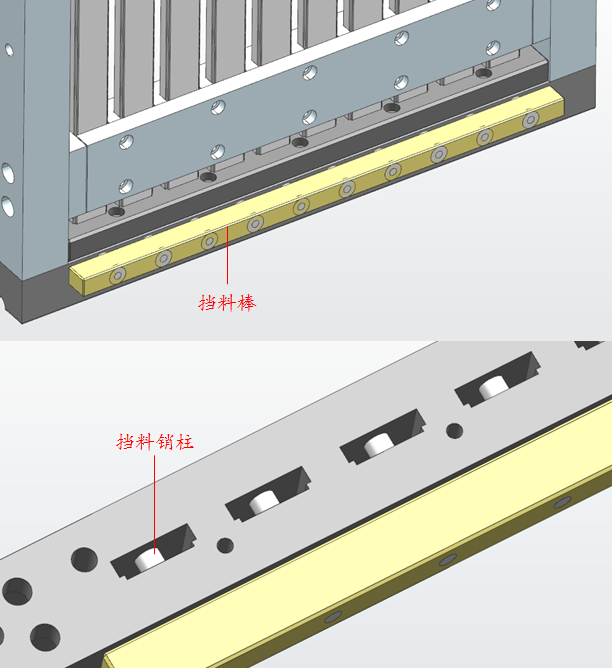
有人可能会有疑问,装料管装满料后,放入支架时,下盖不会掉出来吗?其实还有一个机构,就是用来防止这种情况出现的:
工人将装料管装满后,把挡料棒插入到装料管的底部,这时挡料棒上的销柱就可以把装料管中的料挡住,防止掉落;等装料管固定好后,拿出挡料棒,就可以了。
2、阻料机构,以及为什么要用推送气缸推动整个机构滑动
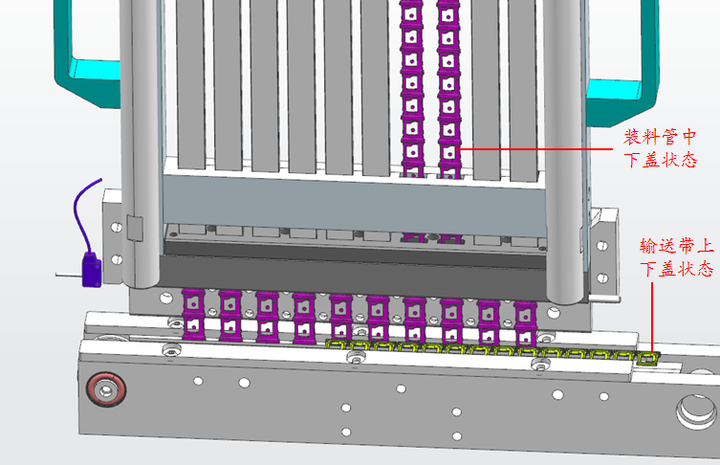
可以看到,装料管中的下盖状态是立着的,而到输送带上是需要躺着的,这时候就需要用到整个机构滑动了,下面来看一下阻料机构和整个机构滑动的工作原理:
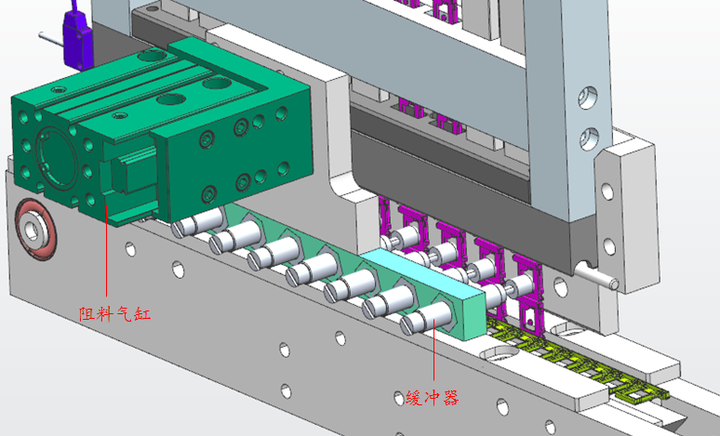
1)下盖从装料管落到底部时,阻料气缸推动缓冲器将倒数第二排下盖顶住; 2)这时,整个机构向后移动,最下排的下盖就会被带着躺在输送带上了; 3)重复以上过程,就可以实现自动上料了。
二、下盖输送带
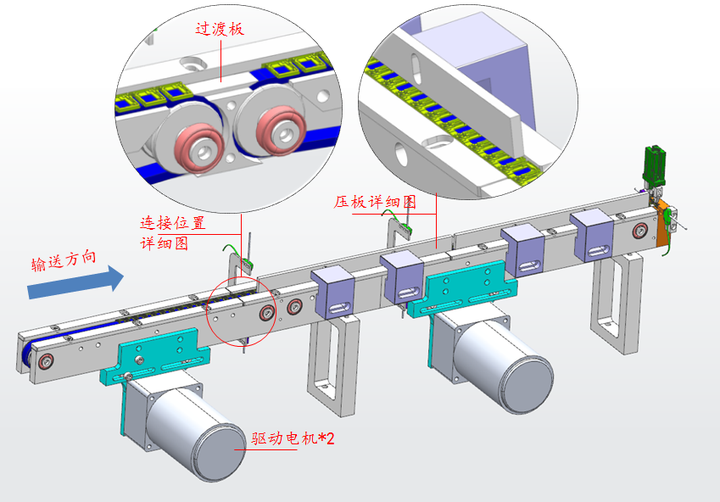
输送带分成了两段,是为了在上料的时候不影响后段产品的输送;由于下盖比较小,所以在两个输送带中间要使用过渡板;压板的作用是防止下盖在输送过程中产生堆叠现象。
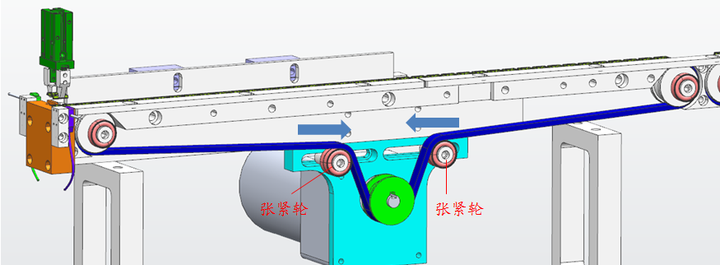
再来看一下输送带的张紧方式:通过将两侧张紧轮向中间调节,来实现张紧输送带的目的。
三、下盖机械手
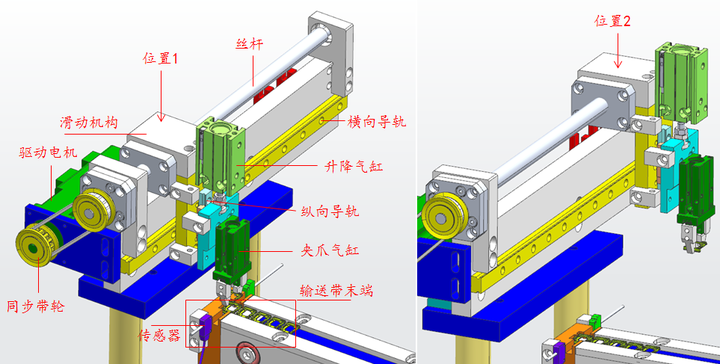
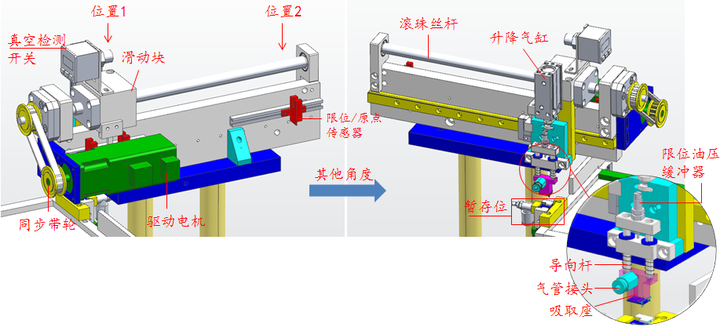
这个机械手整体采用滚珠丝杆+导轨的传递方式,由驱动电机通过同步带轮,将动力传递给丝杆,从而使滑动机构和上面的组件沿着横向导轨做往复直线运动;升降气缸推动夹爪气缸沿着纵向导轨做上下运动。
简单介绍了一下各部件的运动关系,再来看一下机械手的工作顺序:
1、下盖到达输送带末端,传感器检测到有料;
2、机械手移动到位置1,升降气缸推送夹爪气缸向下,夹住下盖后升起; 3、机械手移动到位置2,将下盖放到转盘组装工序。
2PCB焊接板&卡扣上下料工序
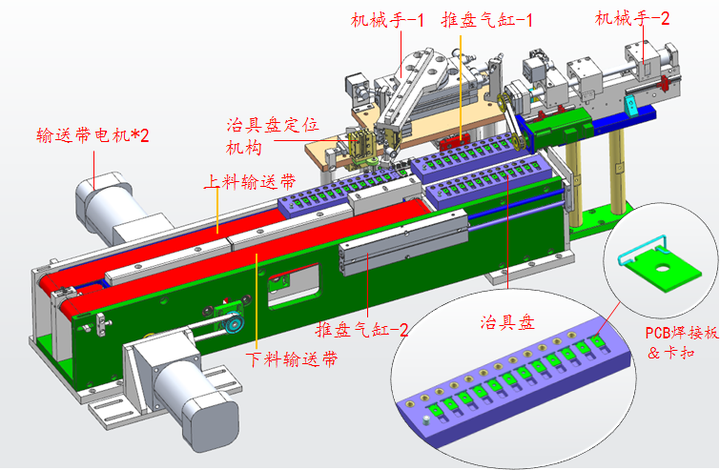
从图中可以看到,两条输送带中,靠上的是上料输送带,用来将装满PCB焊接板&卡扣的治具盘,输送到固定位置进行上料;靠下的是下料输送带,用来将空的治具盘回收。
这个工序的工作步骤如下:
1、人工将装满料的治具盘放到上料输送带上,治具盘跟随输送带到达定位机构处;
2、机械手-1从治具盘上取料,放到暂存位; 3、机械手-2再从暂存位取料,放到转盘组装工序中;
4、当治具盘中的料被取完后,定位机构在移动下一个治具盘的同时,将空料治具盘推到推盘气缸-1处; 4、推盘气缸-1再将空料治具盘推到推盘气缸-2处,最后由推盘气缸-2将治具盘推到下料输送带上,输送到线外。
放上这段动作的GIF图,可以看的更清楚一点:
继续来分析一下工序中的治具盘定位机构、机械手-1和机械手-2。
一、治具盘定位机构
其实通过上面的GIF动图,相信大家对这个机构的动作已经有了大概的了解,下面再来详细说一下它的动作顺序:
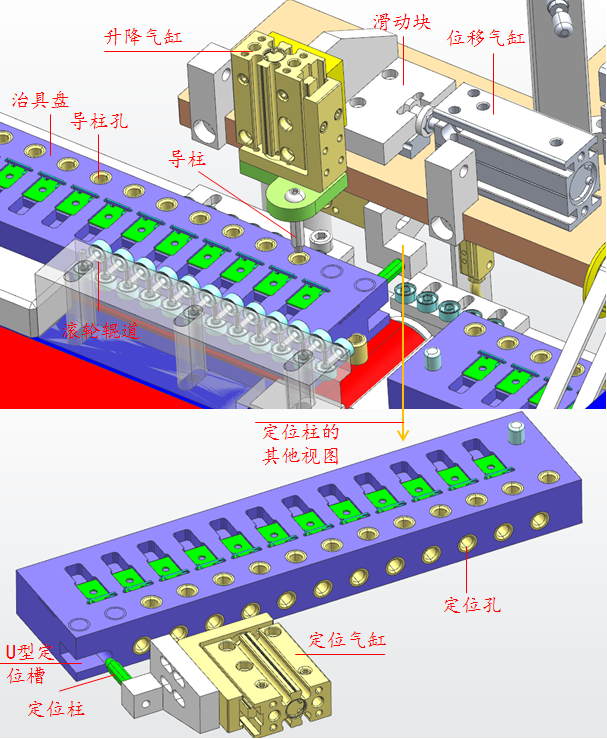
1、载料治具盘跟随上料输送带向前运动,进入滚轮辊道,此时定位柱处于前伸状态,当U型定位槽到达定位柱时,治具盘停止前进;
2、这时,机械手-1取走治具盘上第一个料; 3、取完料后,位移气缸推动滑动块和升降气缸向前,到位后,升降气缸推送导柱向下,插入导柱孔中; 4、此时,定位气缸带动定位柱缩回,然后位移气缸缩回,将治具盘往后拉动一段距离(距离等于导柱孔的间距 ); 5、到位后,定位气缸带动定位柱向前,插入定位孔中;
6、循环以上动作。
二、机械手-1、暂存位
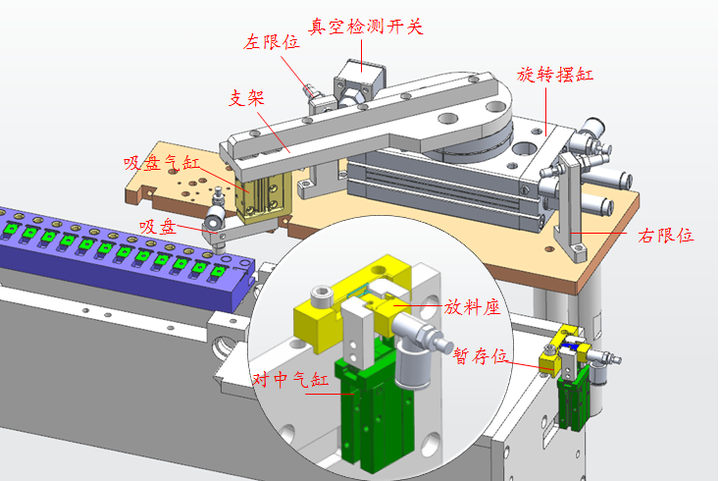
先来了解一下各个部件:
左限位、右限位:由于旋转摆缸在带动支架和末端机构转动时惯性较大,因此两侧加了带有油压缓冲器的限位。(老张也建议大家在使用旋转摆缸这种部件,且惯性较大时,可以在两侧加上外部的缓存限位,这样可以让整个机构更加稳定)
放料座:大家可以看到,在放料座上面有一个孔,在侧面有一个气管接头,它们的作用是为了吸住PCB焊接板。
下面再来说一下工作顺序:
1、治具盘到达定位机构处,吸盘气缸向下,用吸盘吸住PCB焊接板&卡扣; 2、吸盘气缸提起,旋转摆缸旋转到右限位处,将PCB焊接板&卡扣放在放料座上; 3、对中气缸夹一下,然后放料座吸住PCB焊接板,对中气缸松开,等待机械手-2来吸取工件。
三、机械手-2
其实这个机械手和上面说到的下盖机械手的传递方式和动作原理是一样的,不同的是这个机械手的末端是采用吸取的方式,在吸取座的上面有一个孔,侧面有一个气管接头,它们的作用是用来吸取PCB焊接板。
所以这个机构的工作顺序是这样的:
1、滑动块处于位置1时,升降气缸向下,吸取座吸住PCB焊接板,然后暂存位上面的 放料座停止吸取PCB焊接板;
2、升降气缸提起,然后滚珠丝杆驱动滑动块以及上面的机构移动到位置2,将PCB焊接板&卡扣放到转盘组装工序。 以上部分,就是PCB焊接板&卡扣上料工序的机构和原理分析,是不是看的有点累,再加加油,就快结束了。
3壳体端盖上料工序
其实这个工序的机构和下盖上料工序的机构基本上是一样的,所以咱们就直接来说说它们之间不同的地方:
一、推送气缸推动整个机构滑动的作用不同
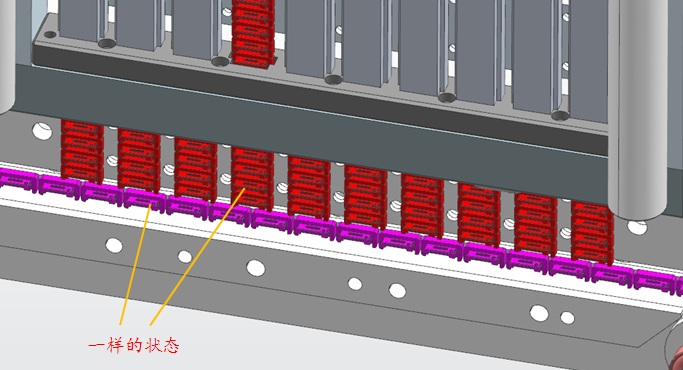
还记得前面说:在下盖上料工序中,这个部分的作用是为了让下盖躺下;但是壳体端盖上料工序中,料在装料管和在输送带上的状态是一样的,具体看下图:
那么这个机构在工序中的作用是什么呢?咱们都知道,这些料都是靠重力落下来,所以上面的料都是压在最后一个料上的,因此这个机构的作用其实是为了将上面的料都移开,方便输送带将最下面的一排料输送走。
二、上料机械手的取料方式不同
在下盖上料工序中,机械手的取料方式是用的夹爪气缸;而在这个工序中,取料用的是吸取方式,具体看下图:
4转盘组装工序
再来看一张轴测图:
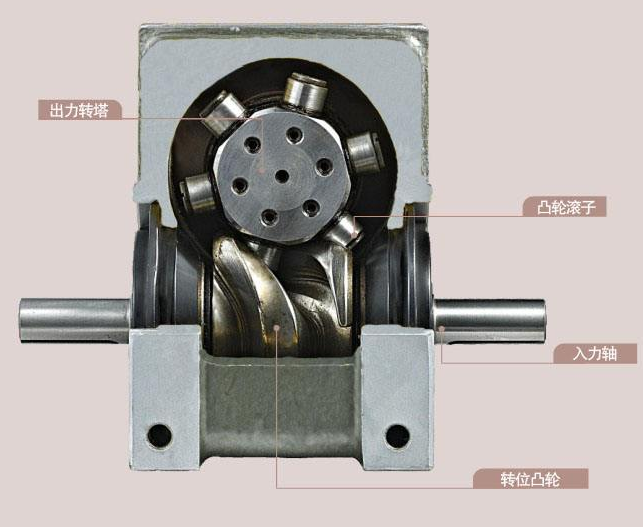
转盘工序采用的是凸轮分割器转动的方式,而关于凸轮分割器,其实之前在其他文章里简单提过,这里我就说的稍微详细点,先来看一下其中一种凸轮分割器的内部结构:
然后说一下凸轮分割器涉及的相关参数(以下内容来自百度百科):
1、工位数:出力轴每旋转一圈的停动数; 2、驱动角(凸轮分度角):入力轴旋转角要求执行一次分度运动,角度越大,运动越平稳; 3、停止角:当出力轴固定时,入力轴旋转的角度。这角度和驱动角的总和为360度; 4、旋转转矩:在固定位置下最大转矩可施加到出力轴上。如果施加的转矩大于这个值,则会损坏分割器; 5、动态转矩:在分度期间,作用在出力轴上的最大转矩。
感兴趣的同学可以到网上找一些更详细的资料了解一下。
而在这个工序中,一共有8个工位数(上图中做了标注),从1-8,分别代表组装产品的次序,下面就来介绍一下每个工位是干嘛的。
工位1:将下盖装在治具盘上; 工位2:对下盖进行定位; 工位3:将PCB焊接板&卡扣,安装在下盖上; 工位4:没有作用,凑数的; 工位5:安装壳体端盖; 工位6:检测壳体端盖有没有安装到位;工位7:OK品,输出到线外;工位8:NG品,回收。
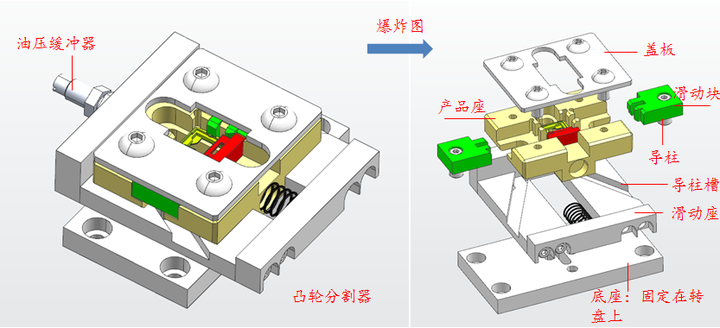
在开始分析每个工位之前,咱们先来分析一下转盘上的治具盘:
首先要知道的是:产品座是固定在底座上的;滑动块可以在产品座上左右滑动,同时和它固定在一起的导柱可以在滑动座上的导柱槽内滑动;滑动座可以在产品座和底座之间前后滑动。
知道了以上关系,咱们来看一下这个治具盘的工作原理:推动滑动座往前运动 → 从而带着导柱和滑动块向产品座的两侧运动 ;
去掉推动滑动座的动力 → 由于弹簧的作用,滑动座向后运动 → 从而带着导柱和滑动块向内侧运动。
两侧的滑动块在缩到内侧时,是可以压住下盖的,所以这样设计的原因是为了在取放下盖或整个产品时,将滑动块让开;而在其他时候为了防止下盖或整个产品改变位置,用滑动块将它压住。
分析完了治具盘的工作原理,咱们就来看一下每个工位上的机构:
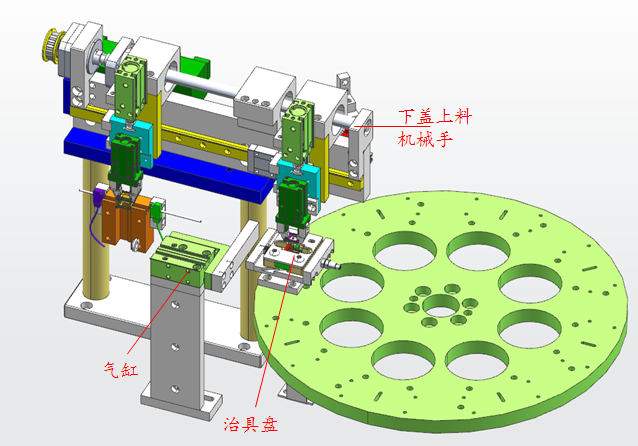
一、工位1
下盖上料机械手在将下盖放到治具盘之前,气缸先将治具盘上的滑动座往前顶,从而使两侧的滑动块向外,为放入下盖让出位置,等下盖放到位后,气缸缩回,治具盘上两侧的滑动块压住下盖。
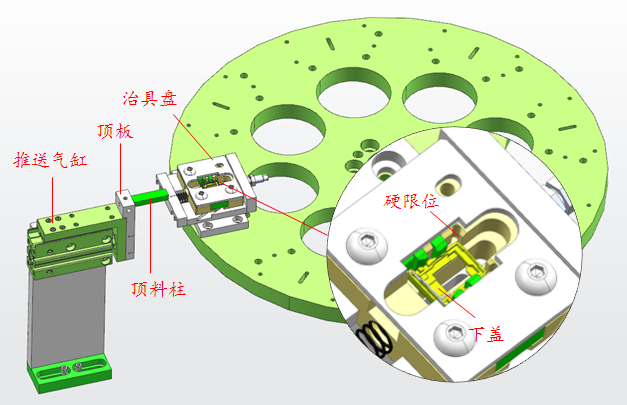
二、工位2
这个工位的作用是将下盖顶到硬限位处进行定位,以便于后面安装PCB焊接板&卡扣。 推送气缸往前推,首先顶板先接触治具盘上的滑动座,将两侧的滑动块松开,然后顶料柱再将下盖顶在硬限位上;推送气缸退回时,是相反的动作。
三、工位3、工位4
关于工位3,其实就是上料机械手把PCB焊接板&卡扣直接安装在下盖上,动作原理都比较简单,所以这里就不详细说了;而关于工位4,前面也说了,没啥作用,就是凑数的。
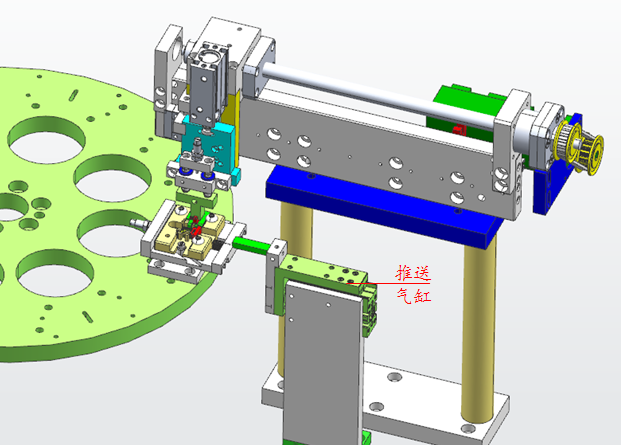
四、工位5
大家可以看到,这个工位中,也有一个推送气缸机构,其实它的作用和工位二是一样,就是在安装壳体端盖之前,对下盖进行再一次的定位,原理和工位二也是一样的。(注:前面的视频中,在这个位置有点错误,大家注意一下)
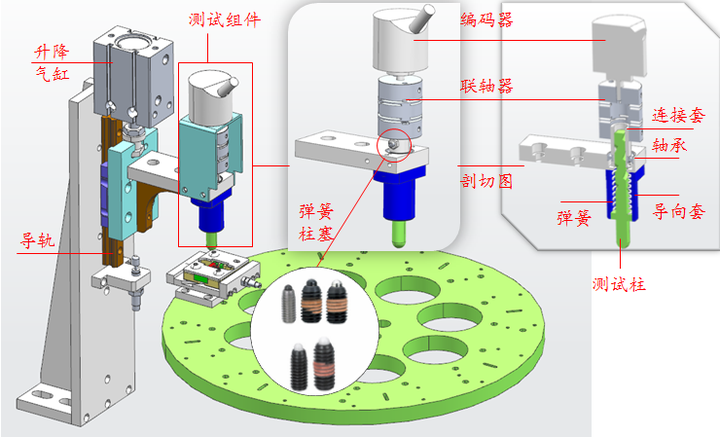
五、工位6
前面提到了,这个工位的作用是用来判断壳体端盖有没有安装到位的,先来说一下测试组件中,各个零件的连接关系:编码器通过联轴器和连接套固定在一起;连接套可以轴承中转动;测试柱在导向套内上下滑动,但无法旋转;测试柱穿在连接套内,通过弹簧柱塞顶住斜面部分。
基于以上的连接关系,当测试柱上下运动时,会带动弹簧柱塞和连接套转动,而编码器通过转动的角度来判断测试柱移动的距离,所以测试组件判断壳体端盖是否安装到位的方式为:安装到位的壳体端盖和没有安装到位的壳体端盖,让编码器转动的角度不同。
六、工位7
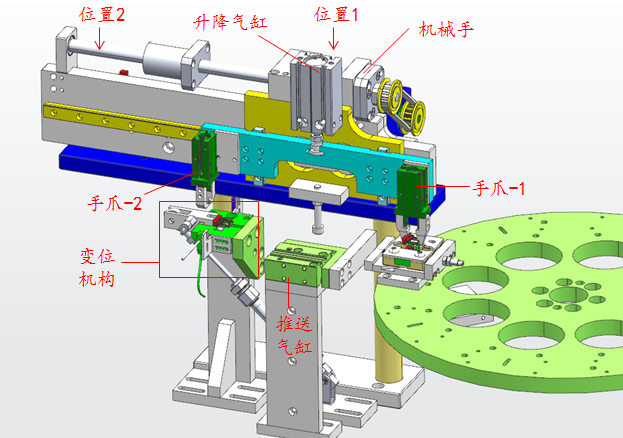
通过工位6判断产品是否合格,合格的话,就在这个工位将产品取下,具体的工作顺序如下:
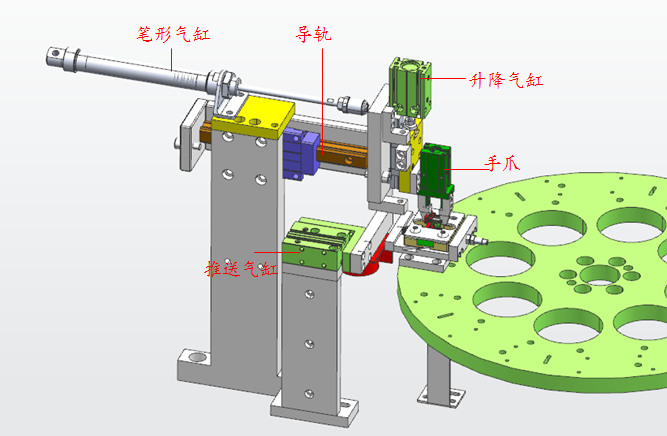
1、治具盘到达工位7后,推送气缸推动治具盘上的滑动座,打开两侧的滑动块; 2、机械手处于位置1,升降气缸下降,用手爪-1夹起治具盘上的产品,然后提起来; 3、机械手移动到位置2,手爪-1将产品放在变位机构上,由变位机构将产品立起来; 4、机械手继续移动到位置1,这时手爪-1取治具盘上的产品,而手爪-2取变位机构上立起来的产品; 5、最后机械手移动到位置2,手爪-1将产品放到变位机构;手爪-2将产品放到线外。
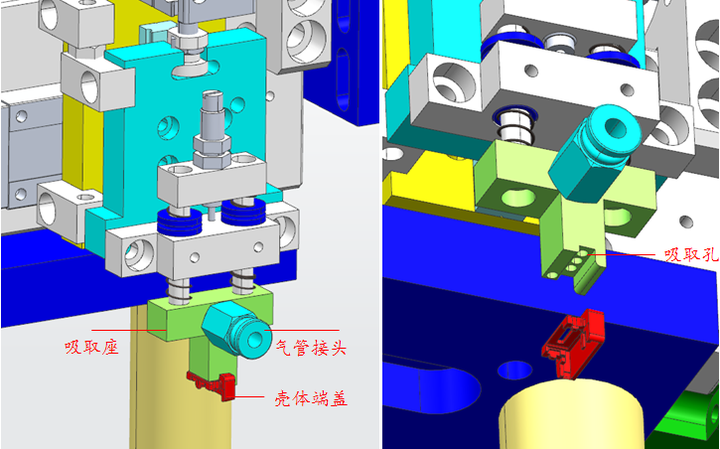
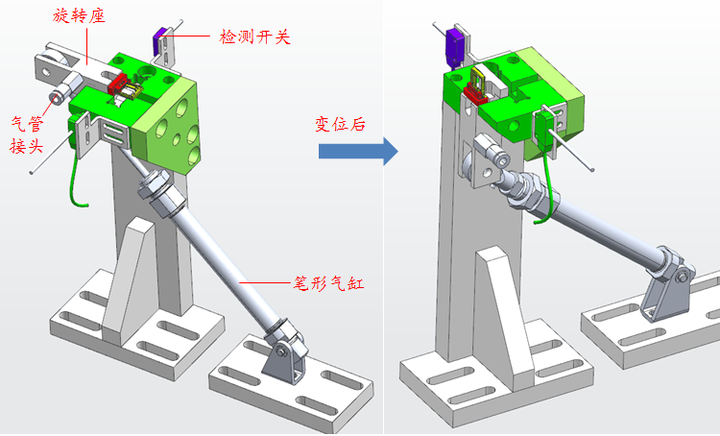
再来看一下变位机构的工作原理:
左侧为手爪-1将产品放在变位机构上的状态,右侧为将产品立起后的状态。
当手爪将产品放在旋转座上后,检测开关检测到产品 → 真空发生器通过气管接头为旋转座提供负压,吸住产品 → 笔形气缸缩回,将产品立起来,等待手爪-2抓取。
七、工位8
前面工位7是合格品的下料,那么自然也要有不合格品的下料,这个工位就是用来将不合格的产品取下来的,上图中的机构在前面其实都已经说过了,所以在这里就不再啰嗦了。
呼~到这里,整个设备就算是分析完了,不过老张要说一下的是:这个图纸出来的时间比较久了,可能很多朋友早都已经拿到过了,而且我咨询了几个人,都说这个机构在实际生产中不好调试,所以就说明它还是有缺陷的,不过图纸中还是有很多值得我们学习借鉴的机构,记下这些机构,以便我们在需要的时候能随时用上,这样才能让我们在设计时更加轻松。
OK,按照惯例,还是把图纸放在公众号,关注后回复:组装机,就可以拿到下载链接了。
| 

 发表于 2020-4-8 10:49:39
发表于 2020-4-8 10:49:39

 楼主
楼主