本帖最后由 每次一例 于 2020-3-9 10:50 编辑
对于咱们机械设计来说,机构真的挺重要的,它就像是弹药,而我们每次的设计就像是打仗,没有弹药,就没法持续战斗,当然你也可以去现找,但总归是耽误时间的;所以注重平常对于机构的积累,则可以让我们在设计的时候能够游刃有余。
今天就来说三种用于搬运领域的机构,个人觉得都是比较值得借鉴的,还是那句老话,如果机构你都了解过,就权当再复习一遍;没有了解过的,正好利用几分钟的时间,了解三种机构,何乐而不为? 好了,下面就进入正题,先来看看这次要说的三种机构,分别是什么,也好让大家有点印象:
1、酒瓶码垛机械手 2、移栽机构 3、变距机械手
说是三种机构,其实是五种,最后的变距机械手根据工作原理的不同,又分了三种。下面就开始依次分析。
一定要看到最后哦
01.酒瓶码垛机械手
先来看一个视频,了解一下这个机械手是怎么工作的:
[media=x,500,375][/media]
然后,下面看三维模型:
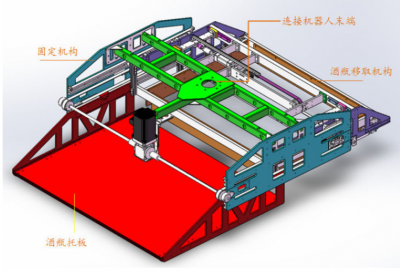
机构整体的工作顺序为:酒瓶移取机构将整层的酒瓶刮到酒瓶托板上,然后进行搬运。 以上的顺序比较粗略,接下来就将机构的三个组成部分拆开来分析,这样就能更清楚它们的工作原理(由于酒瓶托板机构比较简单,所以就不谈了)。
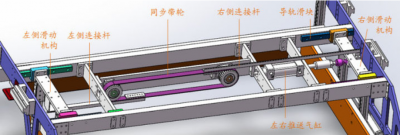
1、固定机构
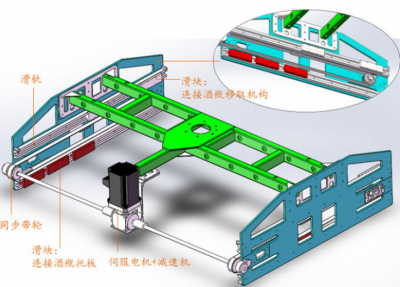
从图中可以看到,酒瓶托板和酒瓶移取机构,通过左右两侧的滑块和固定机构连接; 同时,我们可以看到上图中的同步带轮机构,它的作用是:将酒瓶托板和酒瓶移取机构,分别连接同步带的上、下侧,这样,随着同步轮的转动,以上两个机构就分别跟随同步带的上下侧做对称直线运动,刚好实现了上面说到的动作:将酒瓶刮到托板上。
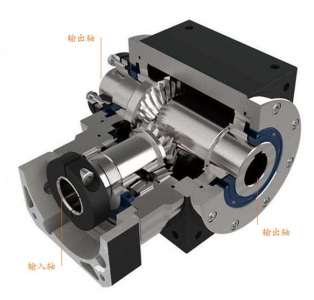
以上就是关于酒瓶托板和酒瓶移取机构的运动原理,再来说一下图中的减速机,我们可以看到这种减速机有两个输出轴,可能平常应用的比较少,这里就稍微提一下,实际它是一种螺旋伞齿轮减速机,是一种标准品(一般做行星减速机的厂家都有销售),它的内部机构是这样的:
OK,关于固定机构就是这些,下面再来说酒瓶移取机构:
2、酒瓶移取机构
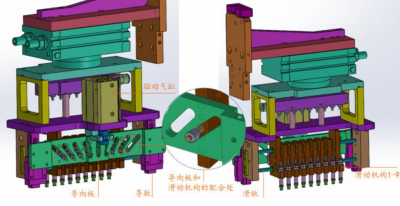
这个机构算是三个组成部分里最复杂的一个了,看下图:
上图中左右推送机构详图:
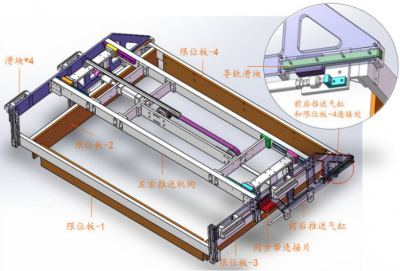
机械手在抓取酒瓶时,都有一个规整的动作,而这个动作就是靠图中的限位板1-4实现:
限位板-1是固定的;限位板-4的动作是靠前后推送气缸实现的;从第二张图可以看到,左右推送气缸推动右侧滑动机构以及机构上的限位板-2,从而驱动右侧连接杆移动,然后又带动同步带轮机构运动,最后,下侧的同步带驱使左侧连接杆和左侧滑动机构运动,而机构上的限位板-3也会跟着一起运动。这样,限位板-2和限位板-3就在左右推送气缸的驱动下,做对称滑动。
以上,限位板1-4的动作就实现了规整酒瓶的目的。其实回过头再来看,整个机构运用的核心结构就是:将需要对称滑动的两个机构,固定在同步带的上下侧,然后利用同步带轮的运动,实现对称滑动的目的。
上面的视频里,用于酒瓶每层之间的隔板,是通过其他抓取机构实现的,下面再来看一个码垛视频,是直接将抓取隔板的吸盘放置在酒瓶托板下,这样就可以用一个机构实现两个功能。
[media=x,500,375][/media]
02.PCB板翻转机构
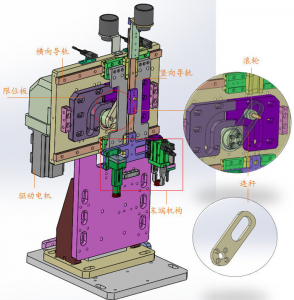
先来看一下整体机构:
首先,从图中可以看到:末端机构固定在竖向导轨上,滚轮和竖向导轨连接,三个零件一起沿着滑块上下滑动;然后,驱动电机驱动连杆旋转,从而使滚轮在连杆滑槽以及限位板滑槽内运动,随着滚轮在滑槽内的运动,竖向导轨也跟着滚轮一起横向以及竖向运动,具体可以看下面的动图:(为了方便查看,我把末端机构隐藏了)
03.变距机械手
关于这一项,准备说3种不同工作原理的变距机械手,下面开始。
1、变距机械手-1
先来看一下动图:
然后再来分析一下这个机构:
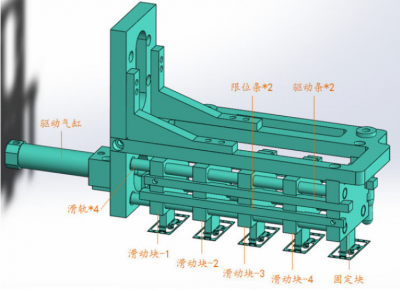
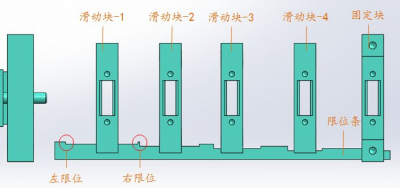
首先我们要知道的是:滑动块-1和两侧的驱动条是连接的;固定块是连接在整体机构上的,而固定块又是和限位条连接的。
然后再来看工作顺序:
→ 驱动气缸推动滑动块-1,带动驱动条向前运动; → 然后驱动条再依次的推动滑动块-2、滑动块-3和滑动块-4,直到它们分别碰到限位条上的硬限位(这一点看下面的分析); → 驱动气缸收回时,动作相反。
再来看一下驱动条和限位条是怎么工作的,先看驱动条:
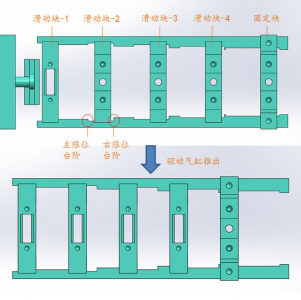
上图中,可以看到滑动块-2/3/4左右两侧都有限位台阶,当驱动条向右运动时,每个滑动块的左限位台阶依次推动滑动块,最后到达指定位置(这个指定位置实际上就是限位条的硬限位,见下面的图);驱动条向左运动时,和以上动作相反。 再来看限位条的图:
可以看到,每个滑动块的左右两侧都有限位,驱动气缸推出时,每个滑动块都被推到右限位上;气缸缩回时,滑块又被推到左限位上。
以上,就是变距机械手-1的工作原理,咱们继续分析另外两个。
2、变距机械手-2
这个机械手的结构比较简单明了,说一下工作顺序,估计大家都清楚了:
→ 驱动气缸带动导向板,沿导轨上下运动; → 使得滑动机构上的小轴承在导向板上的长圆孔滑槽内滑动,最终转化成的运动就是:滑动机构沿着滑轨移动,且移动距离和长圆孔对应的横向长度相等。
是不是很简单,再来看最后一个。
3、变距机械手-3
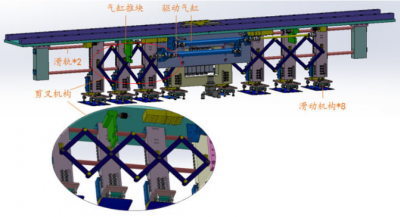
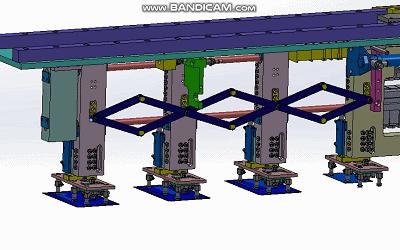
这个变距机械手利用的是剪叉机构,前面的文章也讲过剪叉式升降机,感兴趣的可以找一下。
不过这个是多级剪叉机构,轴销固定在滑动机构上,当驱动气缸推动气缸推块时(注意:推块是固定在滑动机构上的),带动和推块固定在一起的滑动机构沿滑轨移动,由于滑动机构之间是通过剪叉机构连接的,所以在其中一个滑动机构移动时,其他滑动机构也会跟着一起移动,从而达到变距移载的目的,具体看下面的动图:
好了,以上就是三种机构的分析,对于机构,其实最重要的就是要掌握它的原理,然后利用这些原理将机构延伸出更多更广的用法,才是我们真正的目的。
我还是将这几种机构的模型放在公号里,供大家参考,关注后回复:三种模型,就可以了。
| 

 发表于 2020-3-9 10:43:53
发表于 2020-3-9 10:43:53




 楼主
楼主