|
随着物联网的普及,不同的设备以及不同的产线已经不再是毫不相关的独立个体,而是逐渐建立联系,集成在一起。产线集成对于无人工厂的实现至关重要,各产线之间数据不断交互、反馈,进而在无需人员监控的情况下,实现对生产的精准把控,降低人力不稳定因素的干扰,提升自动化程度,提高生产效率。 机器人夹具用于工业自动化设备中,是现代工业自动化设备的新进技术之一,主要与机器人的配合形式出现在现代工业生产中,常见的应用主要有机床上下料、工件拆码垛、焊接、研磨等作业。机器人夹具技术的出现,拓展了机器人应用,以往由工人操作的作业不断被机器人取代,加快了无人化工厂的进程。而随着技术的不断进步,自动快换等智能化功能也使自动化设备的性能不断优化,更加智能。 工业机器人智能柔性夹具是将工业机器人技术和产品柔性制造有机结合,不仅使企业节约了产品工艺开发、设备采购及人工成本,还大幅提高生产效率和新产品的制造质量。相比于过去,工业机器人、现场总线等新技术的出现为现代工厂的智能制造带来了新的机遇,使得产品的整线生产加工向全自动、高柔性、智能化的模式转变。
6 P) C5 Q- ?9 B! c
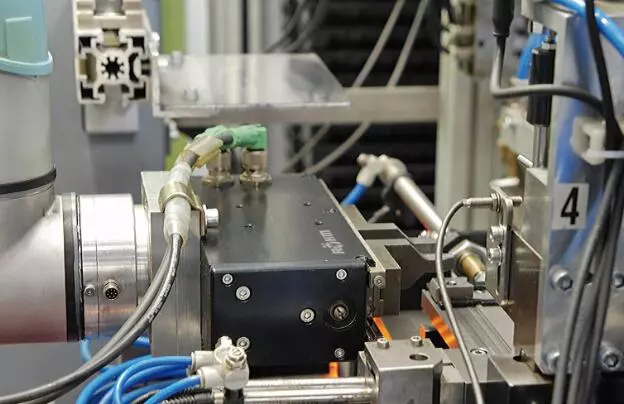
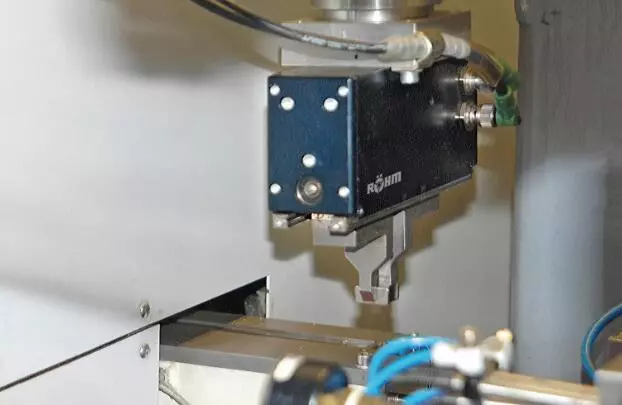
案例:电动夹具多工件夹取自动生产工艺的加工需求 小客车电动机的分电器外壳,其原件是柱形材料首先在一个隔热压力机上进行高速剪切切割并拉长,该剪切切割技术生产的工件用较高强度或高强度材料制成。接着自动化地将毛坯件放置在一部机器上加工成产品。该设备单元中要对毛坯件进行镗孔加工、铣加工和去毛刺加工,在毛坯件从工作台输出前,在该设备单元的一个线性加工点进行清洗、检验并摆放在发货专用的工件支架上。 因为机械手夹具无需进行作业准备便可夹起并摆放不同体积的工件,所以作为一种新的操作装置具备特殊的优点。加工制造的每个小客车分电器外壳的外形尺寸均为18mm×12mm×25mm,加工后由机械手夹具逐个将其夹起并送达清洗流程,之后被送至集成在机械中的检验单元进行检验,主要检验这些工件是否已经有镗孔。 机械手夹具的短工作周期 机器人手臂带动电动夹具由垂直方向向水平方向变化,并将工件送至检验单元,之后再将工件取出并垂直放置在接收轨道上,而带有电动夹具的机器人手臂回转的空间比很小,每个工件的夹取时间仅为70ms。 如果该电动夹具已经将6个工件摆放到了接收轨道上,接着回转90°,并将这6个工件包装成一组,再将其摆放进一个托盘里。当托盘的所有位置均被6个分电器外壳占满后,该托盘便由透明度很好的薄膜封住并及时提供给用户。 ▲ 机器人手臂带着电动夹具由垂直向水平方向回转,将工件送至检验单元 该电动夹具不仅作业灵活,且有很强的夹紧力,可以10N保护力量将敏感部件夹住,在下一个作业流程中就可以最大为400N的力夹住其他工件,整个流程实现了自动化,直至该工件被取走并完成发货程序。 ▲ 电动夹具的夹紧力大小范围在10N~400N,能够可靠夹住轻工件和重工件 过去,在一台可实现连续工作的设备上生产小客车分电器外壳的生产流程应分成工件净化、检验和正确摆放位置三个部分。而现在,一个灵活的电动夹具无需进行作业准备便可将6个工件分为一组,并将其以正确位置摆放在一个发货托盘上。机器人夹具与自动化技术的互相结合,带来了工业新形态。 & n" M" g$ f3 @9 X% {8 f' n6 k
[& A" L8 B9 e% ?1 y7 {* k+ u; y
| 

 发表于 2018-8-23 11:23:21
发表于 2018-8-23 11:23:21